Rédigé et vérifié par un professeur diplômé de l’École Polytechnique, avec le niveau d’exigence attendu en classe préparatoire. Découvrir le professeur
En algèbre linéaire, un espace vectoriel est rarement étudié seul : on explore ses sous-structures. Noyaux, images, espaces propres, espaces de solutions — tous ces objets fondamentaux sont des sous-espaces vectoriels. Ce cours te donne les définitions, les théorèmes avec leurs démonstrations, les méthodes de preuve et 8 exercices corrigés pour maîtriser ce chapitre incontournable de CPGE.
I. Définition et caractérisation d’un sous-espace vectoriel
A. Définition formelle
Dans toute la suite, \((E, +, \cdot)\) désigne un \(\mathbb{K}\)-espace vectoriel, où \(\mathbb{K} = \mathbb{R}\) ou \(\mathbb{C}\).
Définition — Sous-espace vectoriel
Soit \(E\) un \(\mathbb{K}\)-espace vectoriel. Une partie \(F \subset E\) est un sous-espace vectoriel (sev) de \(E\) si \(F\), muni des lois induites par \(E\), est lui-même un \(\mathbb{K}\)-espace vectoriel.
En pratique, vérifier l’ensemble des axiomes d’espace vectoriel est inutile : la plupart sont automatiquement hérités de \(E\) (associativité, commutativité, distributivité…). Seules la stabilité et l’existence des éléments neutres et symétriques doivent être contrôlées, ce que résume le théorème suivant.
B. Caractérisation pratique — les trois conditions
Théorème — Caractérisation d’un sous-espace vectoriel ⋆
Soit \(F \subset E\). Les assertions suivantes sont équivalentes :
(i) \(F\) est un sous-espace vectoriel de \(E\).
(ii) Les trois conditions suivantes sont réunies :
- \(0_E \in F\) (non-vacuité)
- \(\forall\, x, y \in F,\; x + y \in F\) (stabilité par addition)
- \(\forall\, \lambda \in \mathbb{K},\; \forall\, x \in F,\; \lambda x \in F\) (stabilité par multiplication scalaire)
(iii) \(F \neq \emptyset\) et \(\forall\, x, y \in F,\; \forall\, \lambda, \mu \in \mathbb{K},\; \lambda x + \mu y \in F\) (stabilité par combinaison linéaire)
Démonstration ⋆.
(i) \(\Rightarrow\) (ii) : si \(F\) est un espace vectoriel, il admet un élément neutre (qui est \(0_E\) par unicité dans \(E\)) et est stable par les lois.
(ii) \(\Rightarrow\) (iii) : soient \(x, y \in F\) et \(\lambda, \mu \in \mathbb{K}\). Par stabilité scalaire, \(\lambda x \in F\) et \(\mu y \in F\). Par stabilité additive, \(\lambda x + \mu y \in F\). De plus, \(0_E \in F\) assure \(F \neq \emptyset\).
(iii) \(\Rightarrow\) (i) : vérifions les axiomes d’espace vectoriel pour \(F\). Puisque \(F \neq \emptyset\), il existe \(x \in F\). En prenant \(\lambda = \mu = 0\), on obtient \(0_E = 0 \cdot x + 0 \cdot x \in F\). L’opposé : pour \(x \in F\), on a \(-x = (-1) \cdot x + 0 \cdot x \in F\) (avec \(\lambda = -1\), \(\mu = 0\)). La stabilité par addition correspond à \(\lambda = \mu = 1\), la stabilité scalaire à \(\mu = 0\). Les autres axiomes (associativité de \(+\), commutativité, distributivité…) sont hérités de \(E\) car \(F \subset E\).
□
En pratique : la version (iii) est la plus efficace en rédaction. Elle condense tout en une seule vérification : prendre deux vecteurs quelconques de \(F\), former une combinaison linéaire, montrer qu’elle reste dans \(F\). C’est la formulation à privilégier en DS et concours.
C. Premiers exemples et contre-exemples
Exemples fondamentaux :
- Sous-espaces triviaux : \(\{0_E\}\) et \(E\) sont toujours des sev de \(E\).
- Droites vectorielles dans \(\mathbb{R}^2\) : pour \(u \neq 0\), \(\mathrm{Vect}(u) = \{\lambda u : \lambda \in \mathbb{R}\}\) est un sev de \(\mathbb{R}^2\) (droite passant par l’origine).
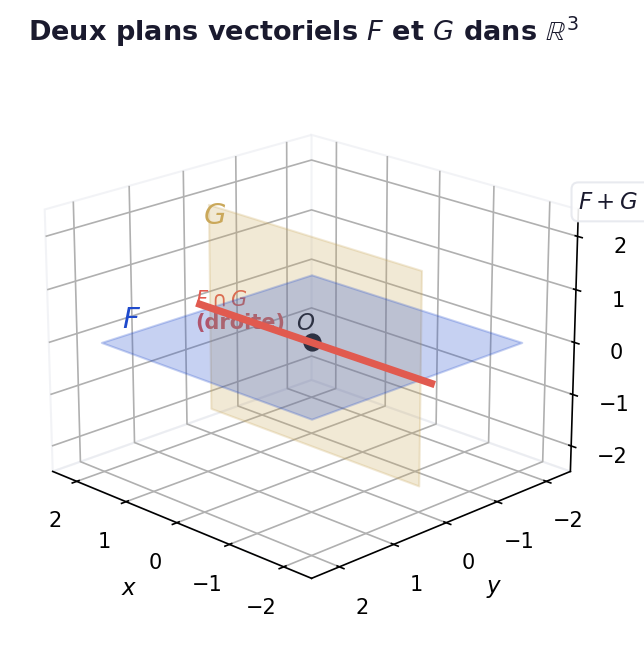
- Plans vectoriels dans \(\mathbb{R}^3\) : \(\{(x,y,z) \in \mathbb{R}^3 : ax + by + cz = 0\}\) avec \((a,b,c) \neq (0,0,0)\).
- Polynômes de degré borné : \(\mathbb{R}_n[X] \subset \mathbb{R}[X]\) est un sev de \(\mathbb{R}[X]\).
- Fonctions nulles en un point : \(\{f \in \mathcal{C}^0(\mathbb{R}, \mathbb{R}) : f(0) = 0\}\) est un sev de \(\mathcal{C}^0(\mathbb{R}, \mathbb{R})\).
Contre-exemples :
- \(\{(x,y) \in \mathbb{R}^2 : x + y = 1\}\) : le vecteur nul \((0,0)\) n’appartient pas à cet ensemble (car \(0 + 0 \neq 1\)). Ce n’est pas un sev — c’est un sous-espace affine.
- \(\mathbb{N} \subset \mathbb{R}\) : non stable par multiplication scalaire (\((-1) \cdot 1 = -1 \notin \mathbb{N}\)).
- \(\{(x,y) \in \mathbb{R}^2 : xy \geq 0\}\) : contient \((0,0)\), mais n’est pas stable par addition. Prends \((2, -1)\)… en fait \((2)(-1) = -2\) < \(0\), donc ce vecteur n’est pas dedans. Considérons plutôt : \((1,0)\) et \((0,-1)\) vérifient \(xy = 0 \geq 0\), mais \((1,0) + (0,-1) = (1,-1)\) donne \((1)(-1) = -1\) < \(0\). Pas de stabilité.
Piège classique : un sous-espace vectoriel passe toujours par l’origine. Si l’ensemble ne contient pas \(0_E\), inutile de vérifier quoi que ce soit d’autre — ce n’est pas un sev. C’est le premier réflexe à avoir.
Tu connais maintenant la définition et la caractérisation. Voyons comment les utiliser concrètement pour rédiger une démonstration de sous-espace vectoriel.
II. Démontrer qu’un ensemble est un sous-espace vectoriel
A. Méthode systématique
Méthode — Démontrer qu’une partie \(F\) est un sev de \(E\)
Étape 1 : Vérifier que \(0_E \in F\).
Étape 2 : Soient \(x, y \in F\) et \(\lambda, \mu \in \mathbb{K}\). Écrire les hypothèses qu’entraîne l’appartenance de \(x\) et \(y\) à \(F\).
Étape 3 : Montrer que \(\lambda x + \mu y \in F\), c’est-à-dire que la combinaison linéaire vérifie la condition d’appartenance à \(F\).
B. Exemples résolus
Exemple 1 (★) — Noyau d’une forme linéaire
Montrer que \(F = \{(x, y, z) \in \mathbb{R}^3 : 2x – y + z = 0\}\) est un sev de \(\mathbb{R}^3\).
Étape 1 : \((0,0,0) \in F\) car \(2(0) – 0 + 0 = 0\). ✓
Étape 2 : Soient \((x_1, y_1, z_1), (x_2, y_2, z_2) \in F\) et \(\lambda, \mu \in \mathbb{R}\). Par hypothèse, \(2x_1 – y_1 + z_1 = 0\) et \(2x_2 – y_2 + z_2 = 0\).
Étape 3 : On calcule :
\(2(\lambda x_1 + \mu x_2) – (\lambda y_1 + \mu y_2) + (\lambda z_1 + \mu z_2) = \lambda(2x_1 – y_1 + z_1) + \mu(2x_2 – y_2 + z_2) = 0\)
Donc \(\lambda(x_1, y_1, z_1) + \mu(x_2, y_2, z_2) \in F\). Ainsi \(F\) est un sev de \(\mathbb{R}^3\).
Fiche de synthèse — Sous-espaces vectoriels
Définitions, caractérisations, formule de Grassmann et méthodes de preuve : tout le cours condensé en une fiche PDF claire et prête à réviser.
📄 Télécharger la fiche PDFUn résumé structuré pour gagner du temps en révisions et ne rien oublier le jour du DS.
Exemple 2 (★★) — Sous-espace d’un espace de fonctions
Montrer que \(F = \{P \in \mathbb{R}[X] : P(0) = P(1)\}\) est un sev de \(\mathbb{R}[X]\).
Étape 1 : Le polynôme nul vérifie \(0(0) = 0 = 0(1)\). Donc \(0 \in F\). ✓
Étape 2 : Soient \(P, Q \in F\) et \(\lambda, \mu \in \mathbb{R}\). On a \(P(0) = P(1)\) et \(Q(0) = Q(1)\).
Étape 3 :
\((\lambda P + \mu Q)(0) = \lambda P(0) + \mu Q(0) = \lambda P(1) + \mu Q(1) = (\lambda P + \mu Q)(1)\)
Donc \(\lambda P + \mu Q \in F\), et \(F\) est un sev de \(\mathbb{R}[X]\).
Contre-exemple commenté — Copie fautive
❌ Copie fautive : « Montrons que \(G = \{(x,y) \in \mathbb{R}^2 : x^2 = y^2\}\) est un sev de \(\mathbb{R}^2\). L’élément nul \((0,0)\) vérifie \(0^2 = 0^2\), donc \((0,0) \in G\) ✓. Soit \((x,y) \in G\) et \(\lambda \in \mathbb{R}\). Alors \((\lambda x)^2 = \lambda^2 x^2 = \lambda^2 y^2 = (\lambda y)^2\), donc \(\lambda(x,y) \in G\) ✓. Conclusion : \(G\) est un sev. »
Diagnostic : L’étudiant a vérifié la non-vacuité et la stabilité scalaire, mais a oublié la stabilité par addition. Or \((1,1) \in G\) et \((1,-1) \in G\), mais \((1,1) + (1,-1) = (2,0)\) avec \(4 \neq 0\), donc \((2,0) \notin G\).
✅ Correction : \(G\) n’est pas un sous-espace vectoriel. En effet, \(G\) est la réunion des deux droites \(y = x\) et \(y = -x\), et la réunion de deux droites distinctes n’est jamais un sev (cf. section IV).
La méthode est en place. Passons en revue les sous-espaces vectoriels que tu rencontreras le plus souvent en CPGE.
III. Sous-espaces vectoriels fondamentaux
A. Sous-espace engendré — \(\mathrm{Vect}(x_1, \ldots, x_k)\)
Définition — Sous-espace vectoriel engendré
Soit \(\mathcal{F} = (x_1, \ldots, x_k)\) une famille de vecteurs de \(E\). Le sous-espace vectoriel engendré par \(\mathcal{F}\) est :
\(\mathrm{Vect}(x_1, \ldots, x_k) = \left\{\displaystyle\sum_{i=1}^{k} \lambda_i x_i : (\lambda_1, \ldots, \lambda_k) \in \mathbb{K}^k\right\}\)
C’est l’ensemble de toutes les combinaisons linéaires de \(x_1, \ldots, x_k\).
Proposition
\(\mathrm{Vect}(x_1, \ldots, x_k)\) est le plus petit sous-espace vectoriel de \(E\) contenant \(x_1, \ldots, x_k\). Autrement dit, pour tout sev \(G\) de \(E\) tel que \(\{x_1, \ldots, x_k\} \subset G\), on a \(\mathrm{Vect}(x_1, \ldots, x_k) \subset G\).
Démonstration. Tout sev \(G\) contenant \(x_1, \ldots, x_k\) est stable par combinaison linéaire, donc contient \(\displaystyle\sum_{i=1}^k \lambda_i x_i\) pour tous \(\lambda_i \in \mathbb{K}\). Ainsi \(\mathrm{Vect}(x_1, \ldots, x_k) \subset G\). Par ailleurs, \(\mathrm{Vect}(x_1, \ldots, x_k)\) est bien un sev de \(E\) (vérification immédiate par la caractérisation).
□
Le lien avec les familles est direct : \((x_1, \ldots, x_k)\) est génératrice de \(F\) si \(F = \mathrm{Vect}(x_1, \ldots, x_k)\), libre si aucun \(x_i\) n’est combinaison linéaire des autres, et c’est une base de \(F\) si elle est à la fois libre et génératrice.
B. Noyau et image d’une application linéaire
Parmi les sous-espaces vectoriels les plus importants en CPGE figurent le noyau et l’image d’une application linéaire.
Théorème ⋆
Soit \(f \in \mathcal{L}(E, G)\) une application linéaire entre deux \(\mathbb{K}\)-ev. Alors :
- \(\ker f = \{x \in E : f(x) = 0_G\}\) est un sous-espace vectoriel de \(E\).
- \(\mathrm{Im}\, f = \{f(x) : x \in E\}\) est un sous-espace vectoriel de \(G\).
Démonstration.
Pour \(\ker f\) : \(f(0_E) = 0_G\) (linéarité), donc \(0_E \in \ker f\). Soient \(x, y \in \ker f\) et \(\lambda, \mu \in \mathbb{K}\). On a \(f(\lambda x + \mu y) = \lambda f(x) + \mu f(y) = \lambda \cdot 0_G + \mu \cdot 0_G = 0_G\). Donc \(\lambda x + \mu y \in \ker f\).
Pour \(\mathrm{Im}\, f\) : \(f(0_E) = 0_G\), donc \(0_G \in \mathrm{Im}\, f\). Soient \(y_1, y_2 \in \mathrm{Im}\, f\) : il existe \(x_1, x_2 \in E\) tels que \(f(x_1) = y_1\) et \(f(x_2) = y_2\). Pour \(\lambda, \mu \in \mathbb{K}\) : \(\lambda y_1 + \mu y_2 = \lambda f(x_1) + \mu f(x_2) = f(\lambda x_1 + \mu x_2) \in \mathrm{Im}\, f\).
□
Conséquence pratique : pour montrer qu’un ensemble \(F\) est un sev, cherche une application linéaire \(f\) telle que \(F = \ker f\). Par exemple, \(F = \{(x,y,z) \in \mathbb{R}^3 : 2x – y + z = 0\} = \ker \varphi\) où \(\varphi(x,y,z) = 2x – y + z\) est une forme linéaire. C’est souvent la démonstration la plus rapide.
C. Espaces propres et hyperplans
Espaces propres. Soit \(f \in \mathcal{L}(E)\) et \(\lambda \in \mathbb{K}\) une valeur propre de \(f\). L’espace propre associé est :
\(E_\lambda = \ker(f – \lambda \, \mathrm{Id}_E) = \{x \in E : f(x) = \lambda x\}\)
C’est un sev de \(E\) (noyau de l’application linéaire \(f – \lambda \, \mathrm{Id}_E\)). La diagonalisation consiste précisément à décomposer \(E\) en somme directe d’espaces propres.
Hyperplans. Un hyperplan de \(E\) (en dimension finie) est un sev de dimension \(\dim E – 1\). Tout hyperplan est le noyau d’une forme linéaire non nulle : \(H = \ker \varphi\) avec \(\varphi \in E^* \setminus \{0\}\).
Ces sous-espaces classiques ne vivent pas isolément : on les combine par intersection, somme et somme directe.
IV. Opérations sur les sous-espaces vectoriels
A. Intersection de sous-espaces vectoriels
Théorème ⋆ — Intersection
Soient \(F\) et \(G\) deux sous-espaces vectoriels de \(E\). Alors \(F \cap G\) est un sous-espace vectoriel de \(E\).
Plus généralement, toute intersection (finie ou non) de sev de \(E\) est un sev de \(E\).
Démonstration ⋆. \(0_E \in F\) et \(0_E \in G\), donc \(0_E \in F \cap G\). Soient \(x, y \in F \cap G\) et \(\lambda, \mu \in \mathbb{K}\). Puisque \(x, y \in F\) et \(F\) est un sev, \(\lambda x + \mu y \in F\). De même, \(\lambda x + \mu y \in G\). Donc \(\lambda x + \mu y \in F \cap G\).
□
Et la réunion ? Contrairement à l’intersection, la réunion de deux sev n’est presque jamais un sev.
Théorème ⋆ — Réunion
Soient \(F\) et \(G\) deux sous-espaces vectoriels de \(E\). Alors :
\(F \cup G \text{ est un sev de } E \iff F \subset G \text{ ou } G \subset F\)
Démonstration ⋆.
\(\Leftarrow\) : si \(F \subset G\), alors \(F \cup G = G\) qui est un sev.
\(\Rightarrow\) : par contraposée. Supposons \(F \not\subset G\) et \(G \not\subset F\). Il existe \(x \in F \setminus G\) et \(y \in G \setminus F\). Montrons que \(x + y \notin F \cup G\), ce qui prouvera que \(F \cup G\) n’est pas stable par addition.
Par l’absurde, supposons \(x + y \in F \cup G\).
- Si \(x + y \in F\), alors \(y = (x + y) – x \in F\) (stabilité de \(F\)), contradiction avec \(y \notin F\).
- Si \(x + y \in G\), alors \(x = (x + y) – y \in G\), contradiction avec \(x \notin G\).
Donc \(x + y \notin F \cup G\), et \(F \cup G\) n’est pas un sev.
□
Piège : ne confonds jamais \(F \cup G\) et \(F + G\). La réunion est rarement un sev ; la somme l’est toujours. Cette confusion est fréquente en DS.
B. Somme de sous-espaces vectoriels
Définition — Somme de sev
Soient \(F\) et \(G\) deux sev de \(E\). La somme de \(F\) et \(G\) est :
\(F + G = \{x_F + x_G : x_F \in F,\; x_G \in G\}\)
Proposition
\(F + G\) est un sous-espace vectoriel de \(E\). C’est le plus petit sev de \(E\) contenant \(F \cup G\).
Démonstration. \(0_E = 0_E + 0_E \in F + G\). Soient \(u = x_F + x_G \in F + G\) et \(v = y_F + y_G \in F + G\), avec \(x_F, y_F \in F\) et \(x_G, y_G \in G\). Pour \(\lambda, \mu \in \mathbb{K}\) :
\(\lambda u + \mu v = \underbrace{(\lambda x_F + \mu y_F)}_{\in F} + \underbrace{(\lambda x_G + \mu y_G)}_{\in G} \in F + G\)
Pour la minimalité : tout sev contenant \(F \cup G\) est stable par addition, donc contient \(x_F + x_G\) pour \(x_F \in F, x_G \in G\).
□
En termes de familles génératrices : si \((e_1, \ldots, e_p)\) engendre \(F\) et \((f_1, \ldots, f_q)\) engendre \(G\), alors \((e_1, \ldots, e_p, f_1, \ldots, f_q)\) engendre \(F + G\).
C. Somme directe et sous-espaces supplémentaires
Définition — Somme directe
Soient \(F\) et \(G\) deux sev de \(E\). On dit que la somme \(F + G\) est directe, et on note \(F \oplus G\), si tout vecteur de \(F + G\) s’écrit de manière unique comme \(x_F + x_G\) avec \(x_F \in F\) et \(x_G \in G\).
Théorème — Caractérisation de la somme directe ⋆
Les assertions suivantes sont équivalentes :
(i) \(F + G = F \oplus G\) (la somme est directe).
(ii) \(F \cap G = \{0_E\}\).
(iii) Pour tout \(x \in F + G\), la décomposition \(x = x_F + x_G\) (\(x_F \in F,\; x_G \in G\)) est unique.
Démonstration ⋆.
(i) \(\Leftrightarrow\) (iii) par définition.
(ii) \(\Rightarrow\) (iii) : supposons \(F \cap G = \{0_E\}\) et soient \(x = x_F + x_G = x_F^\prime + x_G^\prime\) deux décompositions. Alors \(x_F – x_F^\prime = x_G^\prime – x_G\). Le membre de gauche est dans \(F\), le membre de droite dans \(G\), donc leur valeur commune est dans \(F \cap G = \{0_E\}\). Ainsi \(x_F = x_F^\prime\) et \(x_G = x_G^\prime\).
(iii) \(\Rightarrow\) (ii) : soit \(x \in F \cap G\). Alors \(x = x + 0_E = 0_E + x\) donne deux décompositions de \(x\) dans \(F + G\). Par unicité, \(x = 0_E\).
□
Définition — Sous-espaces supplémentaires
On dit que \(F\) et \(G\) sont supplémentaires dans \(E\) si \(E = F \oplus G\), c’est-à-dire si :
\(F + G = E \quad \text{et} \quad F \cap G = \{0_E\}\)
Tout vecteur de \(E\) s’écrit alors de façon unique \(x = x_F + x_G\) avec \(x_F \in F,\; x_G \in G\).
Théorème — Existence d’un supplémentaire
Soit \(E\) un espace vectoriel de dimension finie et \(F\) un sev de \(E\). Alors \(F\) admet au moins un supplémentaire dans \(E\).
Démonstration. Soit \((e_1, \ldots, e_p)\) une base de \(F\). Par le théorème de la base incomplète (cf. section V.B), on la complète en une base \((e_1, \ldots, e_p, e_{p+1}, \ldots, e_n)\) de \(E\). Posons \(G = \mathrm{Vect}(e_{p+1}, \ldots, e_n)\). Par construction, \(F + G = E\) (la famille réunie engendre \(E\)) et la liberté de la base totale assure \(F \cap G = \{0_E\}\).
□
Attention : le supplémentaire n’est pas unique en général. Par exemple dans \(\mathbb{R}^2\), la droite \(F = \mathrm{Vect}((1,0))\) admet pour supplémentaire toute droite \(\mathrm{Vect}((a,b))\) avec \(b \neq 0\). Il y a une infinité de supplémentaires.
Le cas de \(n\) sous-espaces se généralise : \(E = F_1 \oplus \cdots \oplus F_p\) signifie que tout vecteur de \(E\) s’écrit de façon unique comme \(x_1 + \cdots + x_p\) avec \(x_i \in F_i\). La caractérisation utile est : \(F_1 + \cdots + F_p = E\) et \(\forall\, i,\; F_i \cap \displaystyle\sum_{j \neq i} F_j = \{0_E\}\).
Pour mesurer la taille de ces sous-espaces et de leurs combinaisons, il faut savoir en déterminer une base et une dimension.
V. Base, dimension et formule de Grassmann
A. Base d’un sous-espace vectoriel
Trouver une base d’un sous-espace vectoriel est une tâche omniprésente en CPGE. Deux situations se présentent selon la façon dont \(F\) est défini :
| \(F\) est défini par… | Méthode | Résultat |
|---|---|---|
| Générateurs : \(F = \mathrm{Vect}(v_1, \ldots, v_k)\) | Extraire une base en échelonnant la famille (Gauss sur les colonnes) | Base = sous-famille libre extraite |
| Équations : \(F = \{x \in E : \varphi_1(x) = \cdots = \varphi_r(x) = 0\}\) | Résoudre le système homogène, paramétrer les solutions | Base = vecteurs colonnes du paramétrage |
Exemple — Base par paramétrage
Soit \(F = \{(x,y,z) \in \mathbb{R}^3 : 2x – y + z = 0\}\). On paramètre : \(y = 2x + z\) (en prenant \(x\) et \(z\) libres), soit :
\((x, y, z) = (x,\, 2x + z,\, z) = x(1, 2, 0) + z(0, 1, 1)\)
La famille \(\{(1,2,0),\; (0,1,1)\}\) est libre (vecteurs non colinéaires) et engendre \(F\). C’est une base de \(F\), et \(\dim F = 2\).
B. Théorème de la base incomplète et dimension
Théorème de la base incomplète ⋆
Soit \(E\) un \(\mathbb{K}\)-ev de dimension finie \(n\). Toute famille libre de \(E\) peut être complétée en une base de \(E\).
Autrement dit, si \((e_1, \ldots, e_p)\) est libre dans \(E\) avec \(p \leq n\), il existe \(e_{p+1}, \ldots, e_n \in E\) tels que \((e_1, \ldots, e_n)\) soit une base de \(E\).
Ce théorème a des conséquences fondamentales pour les sous-espaces vectoriels :
Corollaire — Dimension d’un sev
Soit \(E\) de dimension finie \(n\) et \(F\) un sev de \(E\). Alors :
- \(F\) est de dimension finie et \(\dim F \leq \dim E\).
- \(\dim F = \dim E \iff F = E\).
- \(\dim F = 0 \iff F = \{0_E\}\).
Démonstration (point 2). \(\Leftarrow\) : évident. \(\Rightarrow\) : si \(\dim F = n\), soit \((e_1, \ldots, e_n)\) une base de \(F\). C’est une famille libre de \(n\) vecteurs dans \(E\) de dimension \(n\), donc c’est une base de \(E\). En particulier, \(E = \mathrm{Vect}(e_1, \ldots, e_n) = F\).
□
Application concours : pour montrer qu’un sev \(F\) est égal à \(E\) tout entier, il suffit de montrer que \(\dim F = \dim E\). C’est souvent plus simple que de prouver directement l’inclusion \(E \subset F\).
En somme directe, la dimension se comporte additivement :
Proposition — Dimension d’une somme directe
Si \(E = F \oplus G\), alors \(\dim E = \dim F + \dim G\).
C. Formule de Grassmann
Théorème — Formule de Grassmann ⋆
Soient \(F\) et \(G\) deux sous-espaces vectoriels de dimension finie d’un \(\mathbb{K}\)-ev \(E\). Alors :
\(\dim(F + G) = \dim F + \dim G – \dim(F \cap G)\)
Démonstration ⋆. Posons \(k = \dim(F \cap G)\) et soit \((e_1, \ldots, e_k)\) une base de \(F \cap G\).
Par le théorème de la base incomplète appliqué dans \(F\), on complète en une base \((e_1, \ldots, e_k, f_1, \ldots, f_p)\) de \(F\), avec \(\dim F = k + p\).
De même dans \(G\), on complète en une base \((e_1, \ldots, e_k, g_1, \ldots, g_q)\) de \(G\), avec \(\dim G = k + q\).
Montrons que \(\mathcal{B} = (e_1, \ldots, e_k, f_1, \ldots, f_p, g_1, \ldots, g_q)\) est une base de \(F + G\).
Famille génératrice : tout \(x \in F + G\) s’écrit \(x = x_F + x_G\) avec \(x_F \in F\) et \(x_G \in G\). Or \(x_F\) se décompose sur \((e_i, f_j)\) et \(x_G\) sur \((e_i, g_l)\), donc \(x\) est combinaison linéaire de \(\mathcal{B}\).
Famille libre : supposons
\(\displaystyle\sum_{i=1}^k \alpha_i e_i + \displaystyle\sum_{j=1}^p \beta_j f_j + \displaystyle\sum_{l=1}^q \gamma_l g_l = 0_E\)
Alors \(\displaystyle\sum_{l=1}^q \gamma_l g_l = -\displaystyle\sum_{i=1}^k \alpha_i e_i – \displaystyle\sum_{j=1}^p \beta_j f_j\). Le membre de gauche est dans \(G\), le membre de droite dans \(F\). Leur valeur commune \(w\) appartient à \(F \cap G\), donc s’écrit \(w = \displaystyle\sum_{i=1}^k \delta_i e_i\).
On a alors \(\displaystyle\sum_{l=1}^q \gamma_l g_l – \displaystyle\sum_{i=1}^k \delta_i e_i = 0_E\). Puisque \((e_1, \ldots, e_k, g_1, \ldots, g_q)\) est une base de \(G\) (famille libre), tous les coefficients sont nuls : \(\gamma_1 = \cdots = \gamma_q = 0\) et \(\delta_1 = \cdots = \delta_k = 0\).
Il reste \(\displaystyle\sum_{i=1}^k \alpha_i e_i + \displaystyle\sum_{j=1}^p \beta_j f_j = 0_E\), et la liberté de la base de \(F\) donne \(\alpha_1 = \cdots = \alpha_k = \beta_1 = \cdots = \beta_p = 0\).
Ainsi \(\mathcal{B}\) est une base de \(F + G\), de cardinal \(k + p + q\). Donc :
\(\dim(F + G) = k + p + q = (k + p) + (k + q) – k = \dim F + \dim G – \dim(F \cap G)\)
□
Cas particulier — Somme directe : si \(F \cap G = \{0_E\}\), alors \(\dim(F \cap G) = 0\) et \(\dim(F \oplus G) = \dim F + \dim G\). Réciproquement, si \(\dim(F + G) = \dim F + \dim G\), la somme est directe.
Tu as maintenant tous les outils théoriques. Passe à la pratique avec ces exercices corrigés.
VI. Exercices corrigés
Voici 10 exercices classés par difficulté croissante, du calcul direct (★) aux problèmes de synthèse type concours (★★★). Chaque correction est détaillée avec le niveau de rédaction attendu en DS.
Exercice 1 ★ — Noyau d’une forme linéaire
Montrer que \(F = \{(x,y,z) \in \mathbb{R}^3 : 2x – y + z = 0\}\) est un sous-espace vectoriel de \(\mathbb{R}^3\). En déterminer une base et la dimension.
Voir la correction
\(F = \ker \varphi\) où \(\varphi : (x,y,z) \mapsto 2x – y + z\) est une forme linéaire sur \(\mathbb{R}^3\). Donc \(F\) est un sev de \(\mathbb{R}^3\) (noyau d’une application linéaire).
Base : la condition \(2x – y + z = 0\) donne \(y = 2x + z\), soit :
\((x, y, z) = x(1, 2, 0) + z(0, 1, 1)\)
La famille \(\{(1,2,0),\; (0,1,1)\}\) est libre (non colinéaire) et engendre \(F\). C’est une base de \(F\).
\(\dim F = 2\). On retrouve \(\dim F = \dim \mathbb{R}^3 – \mathrm{rg}\,\varphi = 3 – 1 = 2\) par le théorème du rang.
Exercice 2 ★ — Contre-exemple : une partie qui n’est pas un sev
Montrer que \(G = \{(x,y) \in \mathbb{R}^2 : x^2 = y^2\}\) n’est pas un sous-espace vectoriel de \(\mathbb{R}^2\).
Voir la correction
On exhibe un contre-exemple à la stabilité par addition. Posons \(u = (1, 1)\) et \(v = (1, -1)\).
\(u \in G\) : \(1^2 = 1^2\) ✓. \(v \in G\) : \(1^2 = (-1)^2 = 1\) ✓.
Mais \(u + v = (2, 0)\) : \(2^2 = 4 \neq 0^2 = 0\), donc \(u + v \notin G\).
Conclusion : \(G\) n’est pas stable par addition, ce n’est pas un sev de \(\mathbb{R}^2\).
Remarque : géométriquement, \(G\) est la réunion des droites \(y = x\) et \(y = -x\), deux sev distincts dont la réunion n’est pas un sev.
Exercice 3 ★★ — Sous-espace de polynômes avec conditions d’annulation
Soit \(E = \mathbb{R}_3[X]\) (polynômes de degré \(\leq 3\)) et \(F = \{P \in E : P(1) = 0 \text{ et } P^\prime(1) = 0\}\). Montrer que \(F\) est un sev de \(E\) et déterminer une base et la dimension de \(F\).
Voir la correction
Sous-espace vectoriel : les applications \(P \mapsto P(1)\) et \(P \mapsto P^\prime(1)\) sont des formes linéaires sur \(E\). Donc \(F\) est l’intersection de deux noyaux de formes linéaires, c’est un sev de \(E\).
Base : écrivons \(P(X) = a + bX + cX^2 + dX^3\).
- \(P(1) = 0\) : \(a + b + c + d = 0\)
- \(P^\prime(1) = 0\) : \(b + 2c + 3d = 0\)
De la deuxième équation : \(b = -2c – 3d\). De la première : \(a = -b – c – d = 2c + 3d – c – d = c + 2d\).
Donc :
\(P(X) = (c + 2d) + (-2c – 3d)X + cX^2 + dX^3 = c(1 – 2X + X^2) + d(2 – 3X + X^3)\)
Or \(1 – 2X + X^2 = (X-1)^2\) et \(2 – 3X + X^3 = (X-1)^2(X+2)\) (vérifiable par développement).
La famille \(\{(X-1)^2,\; (X-1)^2(X+2)\}\) est libre (degrés 2 et 3 distincts) et engendre \(F\). C’est une base de \(F\).
\(\dim F = 2 = \dim E – 2 = 4 – 2\), cohérent avec le fait que \(F\) est défini par 2 équations indépendantes.
Exercice 4 ★★ — Formule de Grassmann dans \(\mathbb{R}^4\)
Soient \(F = \mathrm{Vect}((1,0,1,0),\; (0,1,0,1))\) et \(G = \mathrm{Vect}((1,1,0,0),\; (0,0,1,1))\) dans \(\mathbb{R}^4\). Calculer \(\dim(F + G)\) et \(\dim(F \cap G)\). Déterminer une base de \(F \cap G\).
Voir la correction
\(\dim F = 2\) et \(\dim G = 2\) (chaque paire est libre, ce qu’on vérifie par non-colinéarité).
Pour \(\dim(F + G)\), on échelonne la famille réunie :
\(\begin{pmatrix} 1 & 0 & 1 & 0 \\ 0 & 1 & 1 & 0 \\ 1 & 0 & 0 & 1 \\ 0 & 1 & 0 & 1 \end{pmatrix}\)
\(L_3 \leftarrow L_3 – L_1\) : \((0, 0, -1, 1)\). \(L_4 \leftarrow L_4 – L_2\) : \((0, 0, -1, 1)\). \(L_4 \leftarrow L_4 – L_3\) : \((0, 0, 0, 0)\).
La matrice échelonnée a 3 pivots, donc \(\dim(F + G) = 3\).
Par la formule de Grassmann : \(\dim(F \cap G) = \dim F + \dim G – \dim(F + G) = 2 + 2 – 3 = 1\).
Base de \(F \cap G\) : on cherche \(v \in F \cap G\). Écrivons \(v = \alpha(1,0,1,0) + \beta(0,1,0,1) = \gamma(1,1,0,0) + \delta(0,0,1,1)\). L’identification composante par composante donne \(\alpha = \gamma\), \(\beta = \gamma\), \(\alpha = \delta\), \(\beta = \delta\), soit \(\alpha = \beta = \gamma = \delta\). D’où \(v = \alpha(1,1,1,1)\).
Une base de \(F \cap G\) est \(\{(1,1,1,1)\}\).
Exercice 5 ★★ — Encadrement de la dimension d’une intersection
Soit \(E\) un \(\mathbb{K}\)-espace vectoriel de dimension 7, et \(F, G\) deux sev de \(E\) avec \(\dim F = 4\) et \(\dim G = 5\). Quelles sont les valeurs possibles de \(\dim(F \cap G)\) ?
Voir la correction
Par la formule de Grassmann : \(\dim(F \cap G) = \dim F + \dim G – \dim(F + G) = 9 – \dim(F + G)\).
Encadrement de \(\dim(F + G)\) :
- \(F \subset F + G\) et \(G \subset F + G\), donc \(\dim(F + G) \geq \max(\dim F, \dim G) = 5\).
- \(F + G \subset E\), donc \(\dim(F + G) \leq \dim E = 7\).
Ainsi \(5 \leq \dim(F + G) \leq 7\), soit \(9 – 7 \leq \dim(F \cap G) \leq 9 – 5\), c’est-à-dire :
\(2 \leq \dim(F \cap G) \leq 4\)
Chaque valeur est atteinte. Par exemple dans \(E = \mathbb{R}^7\) avec base canonique \((e_1, \ldots, e_7)\) :
- \(\dim(F \cap G) = 2\) : \(F = \mathrm{Vect}(e_1, e_2, e_3, e_4)\), \(G = \mathrm{Vect}(e_3, e_4, e_5, e_6, e_7)\).
- \(\dim(F \cap G) = 4\) : \(F = \mathrm{Vect}(e_1, e_2, e_3, e_4)\), \(G = \mathrm{Vect}(e_1, e_2, e_3, e_4, e_5)\) (car \(F \subset G\)).
Les valeurs possibles sont \(\{2, 3, 4\}\).
Exercice 6 ★★★ — Décomposition \(\mathcal{M}_n(\mathbb{R}) = \mathcal{S}_n(\mathbb{R}) \oplus \mathcal{A}_n(\mathbb{R})\)
Soit \(E = \mathcal{M}_n(\mathbb{R})\). On note \(\mathcal{S}_n(\mathbb{R})\) l’ensemble des matrices symétriques et \(\mathcal{A}_n(\mathbb{R})\) l’ensemble des matrices antisymétriques.
- Montrer que \(\mathcal{S}_n(\mathbb{R})\) et \(\mathcal{A}_n(\mathbb{R})\) sont des sev de \(E\).
- Montrer que \(E = \mathcal{S}_n(\mathbb{R}) + \mathcal{A}_n(\mathbb{R})\).
- Montrer que \(\mathcal{S}_n(\mathbb{R}) \cap \mathcal{A}_n(\mathbb{R}) = \{0_n\}\).
- En déduire les dimensions de \(\mathcal{S}_n(\mathbb{R})\) et \(\mathcal{A}_n(\mathbb{R})\).
Voir la correction
1. \(\mathcal{S}_n(\mathbb{R}) = \ker \varphi\) où \(\varphi : M \mapsto M – M^\top\) est un endomorphisme de \(E\) (linéarité immédiate). Donc \(\mathcal{S}_n(\mathbb{R})\) est un sev. De même, \(\mathcal{A}_n(\mathbb{R}) = \ker \psi\) avec \(\psi : M \mapsto M + M^\top\).
2. Soit \(M \in E\). On écrit :
\(M = \underbrace{\frac{M + M^\top}{2}}_{\in \mathcal{S}_n(\mathbb{R})} + \underbrace{\frac{M – M^\top}{2}}_{\in \mathcal{A}_n(\mathbb{R})}\)
Vérification : \(\left(\frac{M + M^\top}{2}\right)^\top = \frac{M^\top + M}{2}\) (symétrique ✓) et \(\left(\frac{M – M^\top}{2}\right)^\top = \frac{M^\top – M}{2} = -\frac{M – M^\top}{2}\) (antisymétrique ✓).
3. Soit \(M \in \mathcal{S}_n(\mathbb{R}) \cap \mathcal{A}_n(\mathbb{R})\). Alors \(M^\top = M\) et \(M^\top = -M\), d’où \(M = -M\), soit \(2M = 0\), donc \(M = 0_n\).
4. La somme est directe : \(E = \mathcal{S}_n(\mathbb{R}) \oplus \mathcal{A}_n(\mathbb{R})\), donc \(\dim \mathcal{S}_n + \dim \mathcal{A}_n = \dim E = n^2\).
Une base de \(\mathcal{S}_n(\mathbb{R})\) est formée des \(E_{ii}\) (\(1 \leq i \leq n\)) et des \(E_{ij} + E_{ji}\) (\(1 \leq i \lt j \leq n\)), soit \(n + \frac{n(n-1)}{2} = \frac{n(n+1)}{2}\) vecteurs.
Par complémentarité : \(\dim \mathcal{A}_n(\mathbb{R}) = n^2 – \frac{n(n+1)}{2} = \frac{n(n-1)}{2}\).
Exercice 7 ★★★ — Réunion de deux sous-espaces vectoriels (classique concours)
Soient \(F\) et \(G\) deux sous-espaces vectoriels d’un \(\mathbb{K}\)-espace vectoriel \(E\). Démontrer que :
\(F \cup G \text{ est un sev de } E \iff F \subset G \text{ ou } G \subset F\)
Voir la correction
Sens \(\Leftarrow\) : si \(F \subset G\), alors \(F \cup G = G\) qui est un sev. Idem si \(G \subset F\).
Sens \(\Rightarrow\) (contraposée) : supposons que \(F \not\subset G\) et \(G \not\subset F\). Il existe alors \(x \in F \setminus G\) et \(y \in G \setminus F\).
Considérons \(z = x + y\). Montrons que \(z \notin F \cup G\) :
- Si \(z \in F\) : alors \(y = z – x \in F\) (car \(F\) est un sev et \(z, x \in F\)), ce qui contredit \(y \notin F\).
- Si \(z \in G\) : alors \(x = z – y \in G\) (car \(G\) est un sev et \(z, y \in G\)), ce qui contredit \(x \notin G\).
Donc \(x + y \notin F \cup G\) alors que \(x \in F \cup G\) et \(y \in F \cup G\) : \(F \cup G\) n’est pas stable par addition, ce n’est pas un sev.
Exercice 8 ★★★ — Sous-espaces supplémentaires dans \(\mathbb{R}^4\)
Soit \(E = \mathbb{R}^4\) et :
\(F = \{(x,y,z,t) \in \mathbb{R}^4 : x + y = 0 \text{ et } z – t = 0\}\)
\(G = \{(x,y,z,t) \in \mathbb{R}^4 : x + z = 0 \text{ et } y + t = 0\}\)
- Montrer que \(F\) et \(G\) sont des sev de \(\mathbb{R}^4\) et calculer leurs dimensions.
- Déterminer \(F \cap G\).
- Montrer que \(F\) et \(G\) sont supplémentaires dans \(\mathbb{R}^4\).
- Exprimer la projection sur \(F\) parallèlement à \(G\).
Voir la correction
1. \(F\) et \(G\) sont des noyaux de systèmes d’équations linéaires homogènes, donc des sev de \(\mathbb{R}^4\).
Pour \(F\) : \(x = -y\), \(z = t\), soit \((x,y,z,t) = y(-1,1,0,0) + t(0,0,1,1)\). Donc \(\dim F = 2\) avec base \(\{(-1,1,0,0),\; (0,0,1,1)\}\).
Pour \(G\) : \(x = -z\), \(y = -t\), soit \((x,y,z,t) = z(-1,0,1,0) + t(0,-1,0,1)\). Donc \(\dim G = 2\) avec base \(\{(-1,0,1,0),\; (0,-1,0,1)\}\).
2. \((x,y,z,t) \in F \cap G\) vérifie les 4 équations : \(x + y = 0\), \(z – t = 0\), \(x + z = 0\), \(y + t = 0\).
De \(x = -y\) et \(x = -z\) : \(z = y\). De \(z = t\) : \(t = y\). De \(y + t = 0\) : \(2y = 0\), soit \(y = 0\). Donc \(x = y = z = t = 0\).
\(F \cap G = \{0\}\).
3. \(\dim F + \dim G = 2 + 2 = 4 = \dim \mathbb{R}^4\) et \(F \cap G = \{0\}\), donc \(\mathbb{R}^4 = F \oplus G\).
4. Soit \(v = (x,y,z,t) \in \mathbb{R}^4\). On décompose \(v = v_F + v_G\) avec \(v_F \in F\) et \(v_G \in G\).
Posons \(v_F = \alpha(-1,1,0,0) + \beta(0,0,1,1)\) et \(v_G = \gamma(-1,0,1,0) + \delta(0,-1,0,1)\).
Le système \(v = v_F + v_G\) s’écrit :
\(x = -\alpha – \gamma, \quad y = \alpha – \delta, \quad z = \beta + \gamma, \quad t = \beta + \delta\)En résolvant : \(\alpha = \frac{-x+y}{2}\), \(\beta = \frac{z+t}{2}\), \(\gamma = \frac{-x-y}{2}\), \(\delta = \frac{-y+t}{2}\).
La projection sur \(F\) parallèlement à \(G\) est :
\(p_F(x,y,z,t) = \left(\frac{x-y}{2},\; \frac{-x+y}{2},\; \frac{z+t}{2},\; \frac{z+t}{2}\right)\)
Exercice 9 ★★★ — Projecteur et décomposition en somme directe
Soit \(E\) un \(\mathbb{K}\)-espace vectoriel de dimension finie et \(p \in \mathcal{L}(E)\) un projecteur, c’est-à-dire \(p^2 = p\). Démontrer que \(E = \ker p \oplus \mathrm{Im}\, p\).
Voir la correction
Étape 1 — \(\ker p \cap \mathrm{Im}\, p = \{0_E\}\) :
Soit \(x \in \ker p \cap \mathrm{Im}\, p\). Alors \(p(x) = 0_E\) et il existe \(y \in E\) tel que \(x = p(y)\). Donc \(0_E = p(x) = p(p(y)) = p^2(y) = p(y) = x\).
Étape 2 — \(E = \ker p + \mathrm{Im}\, p\) :
Soit \(x \in E\). Écrivons :
\(x = (x – p(x)) + p(x)\)
Vérifions : \(p(x – p(x)) = p(x) – p^2(x) = p(x) – p(x) = 0_E\), donc \(x – p(x) \in \ker p\). Et \(p(x) \in \mathrm{Im}\, p\) par définition.
Conclusion : \(E = \ker p \oplus \mathrm{Im}\, p\).
Remarque : cette décomposition montre que \(p\) est la projection sur \(\mathrm{Im}\, p\) parallèlement à \(\ker p\). De plus, \(\mathrm{Im}\, p = \ker(p – \mathrm{Id}_E)\) car \(p(x) = x \iff x \in \mathrm{Im}\, p\) (puisque si \(x = p(y)\), alors \(p(x) = p^2(y) = p(y) = x\)).
Exercice 10 ★★★ — Endomorphisme involutif et décomposition (type oral X-ENS)
Soit \(E\) un \(\mathbb{K}\)-espace vectoriel de dimension finie (\(\mathrm{car}(\mathbb{K}) \neq 2\)) et \(f \in \mathcal{L}(E)\) tel que \(f^2 = \mathrm{Id}_E\) (on dit que \(f\) est une involution).
- Montrer que \(\ker(f – \mathrm{Id}_E)\) et \(\ker(f + \mathrm{Id}_E)\) sont des sous-espaces vectoriels de \(E\).
- Montrer que \(\ker(f – \mathrm{Id}_E) \cap \ker(f + \mathrm{Id}_E) = \{0_E\}\).
- Montrer que \(E = \ker(f – \mathrm{Id}_E) + \ker(f + \mathrm{Id}_E)\).
- En déduire que \(E = \ker(f – \mathrm{Id}_E) \oplus \ker(f + \mathrm{Id}_E)\).
- Application : retrouver la décomposition de \(\mathcal{M}_n(\mathbb{R})\) en matrices symétriques et antisymétriques.
Voir la correction
1. Ce sont les noyaux des endomorphismes \(f – \mathrm{Id}_E\) et \(f + \mathrm{Id}_E\), qui sont bien des éléments de \(\mathcal{L}(E)\). Tout noyau d’application linéaire est un sev.
2. Soit \(x \in \ker(f – \mathrm{Id}_E) \cap \ker(f + \mathrm{Id}_E)\). Alors \(f(x) = x\) et \(f(x) = -x\), d’où \(x = -x\), soit \(2x = 0_E\). Comme \(\mathrm{car}(\mathbb{K}) \neq 2\), on obtient \(x = 0_E\).
3. L’idée clé est de factoriser le polynôme annulateur \(X^2 – 1 = (X-1)(X+1)\). Pour tout \(x \in E\) :
\(x = \frac{x + f(x)}{2} + \frac{x – f(x)}{2}\)
Posons \(u = \frac{x + f(x)}{2}\) et \(v = \frac{x – f(x)}{2}\).
- \(f(u) = \frac{f(x) + f^2(x)}{2} = \frac{f(x) + x}{2} = u\), donc \(u \in \ker(f – \mathrm{Id}_E)\).
- \(f(v) = \frac{f(x) – f^2(x)}{2} = \frac{f(x) – x}{2} = -v\), donc \(v \in \ker(f + \mathrm{Id}_E)\).
4. Les questions 2 et 3 donnent exactement la définition de somme directe :
\(E = \ker(f – \mathrm{Id}_E) \oplus \ker(f + \mathrm{Id}_E)\)
5. L’application \(\sigma : M \mapsto M^\top\) (transposition) est une involution de \(\mathcal{M}_n(\mathbb{R})\). On a \(\ker(\sigma – \mathrm{Id}) = \mathcal{S}_n(\mathbb{R})\) et \(\ker(\sigma + \mathrm{Id}) = \mathcal{A}_n(\mathbb{R})\). Le théorème donne \(\mathcal{M}_n(\mathbb{R}) = \mathcal{S}_n(\mathbb{R}) \oplus \mathcal{A}_n(\mathbb{R})\), avec la décomposition explicite \(M = \frac{M + M^\top}{2} + \frac{M – M^\top}{2}\).
Remarque : cet exercice illustre un principe fondamental en algèbre : un polynôme annulateur scindé à racines simples entraîne une décomposition en somme directe des sous-espaces propres. Ici, \(f^2 – \mathrm{Id}_E = 0\) et \(X^2 – 1 = (X-1)(X+1)\) est scindé à racines simples dans \(\mathbb{K}\).
📄 L’essentiel du cours en 1 page
Pour t’entraîner davantage, retrouve nos exercices corrigés sur les espaces vectoriels avec des problèmes type concours.
VII. Erreurs fréquentes et pièges classiques
Erreur 1 — Oublier de vérifier \(0_E \in F\)
C’est la condition la plus rapide à tester et pourtant la plus souvent oubliée. Si \(0_E \notin F\), inutile de continuer : \(F\) n’est pas un sev. Exemple classique : \(\{(x,y) \in \mathbb{R}^2 : x + y = 1\}\) est un sous-espace affine, pas un sous-espace vectoriel.
Erreur 2 — Confondre réunion et somme
\(F \cup G\) n’est presque jamais un sous-espace vectoriel (seulement si \(F \subset G\) ou \(G \subset F\)). \(F + G\) est toujours un sev. En DS, écrire « \(F \cup G\) est un sous-espace vectoriel car \(F\) et \(G\) le sont » est une erreur grave qui coûte cher.
Erreur 3 — Vérifier seulement l’addition ou seulement la multiplication scalaire
Les deux stabilités sont nécessaires. L’ensemble \(\mathbb{N}\) est stable par addition dans \(\mathbb{R}\), mais pas par multiplication par \(-1\). À l’inverse, un ensemble peut être stable par multiplication scalaire sans l’être par addition (quoique ce cas soit plus rare).
Erreur 4 — Dire « \(F\) est un sous-espace vectoriel » sans préciser de quel espace
Un sous-espace vectoriel est toujours un sev de quelque chose. Écrire « \(F\) est un sev de \(E\) » et non simplement « \(F\) est un sev ». C’est une exigence de rigueur élémentaire attendue par les correcteurs de concours.
VIII. Questions fréquentes
Comment démontrer qu'un ensemble est un sous-espace vectoriel ?
Utilise la caractérisation en 2 temps : (1) vérifie que le vecteur nul appartient à \(F\) ; (2) montre que pour tous \(x, y \in F\) et \(\lambda, \mu \in \mathbb{K}\), on a \(\lambda x + \mu y \in F\). Alternativement, identifie \(F\) comme le noyau d’une application linéaire, ce qui conclut immédiatement.
Un sous-espace vectoriel est-il un espace vectoriel ?
Oui, par définition. Un sous-espace vectoriel \(F\) de \(E\) est une partie de \(E\) qui, munie des lois héritées de \(E\), est elle-même un espace vectoriel. Tout sev est donc un espace vectoriel à part entière.
Quelle est la différence entre un espace vectoriel et un sous-espace vectoriel ?
Un espace vectoriel est une structure algébrique autonome (ensemble + deux lois vérifiant 8 axiomes). Un sous-espace vectoriel est une partie d’un espace vectoriel ambiant \(E\) qui hérite de la structure d’espace vectoriel. La nuance : un sev nécessite un espace « parent » \(E\) dans lequel il vit, tandis qu’un espace vectoriel existe de manière abstraite.
La réunion de deux sous-espaces vectoriels est-elle un sous-espace vectoriel ?
Non, sauf dans le cas trivial où l’un est inclus dans l’autre. C’est un résultat fondamental : \(F \cup G\) est un sev si et seulement si \(F \subset G\) ou \(G \subset F\). Pour « combiner » deux sev, il faut utiliser la somme \(F + G\), qui est toujours un sev.
Comment trouver une base d'un sous-espace vectoriel ?
Si le sev est défini par des équations (par exemple \(F = \ker \varphi\)), résous le système homogène et paramètre les solutions : les vecteurs colonnes du paramétrage forment une base. Si le sev est donné par des générateurs (\(F = \mathrm{Vect}(v_1, \ldots, v_k)\)), échelonne la famille par le pivot de Gauss et extrais une sous-famille libre.
Quelle est la formule de Grassmann pour les sous-espaces vectoriels ?
La formule de Grassmann relie les dimensions de deux sev \(F, G\) et de leur somme et intersection : \(\dim(F + G) = \dim F + \dim G – \dim(F \cap G)\). C’est l’analogue pour les espaces vectoriels de la formule \(|A \cup B| = |A| + |B| – |A \cap B|\) pour les ensembles finis.
IX. Pour aller plus loin
Tu maîtrises maintenant la théorie des sous-espaces vectoriels : définition, caractérisation, opérations, base et dimension. Pour approfondir, voici les prolongements naturels :
- Espaces vectoriels : cours complet — les fondations sur lesquelles repose ce chapitre.
- Noyau d’une matrice : définition et calcul — calcul concret du noyau via l’échelonnement.
- Matrice d’une application linéaire — traduire les sev en termes matriciels.
- Rang d’une matrice — le théorème du rang relie \(\dim \ker f\) et \(\dim \mathrm{Im}\, f\).
- Diagonalisation d’une matrice — décomposer \(E\) en somme directe d’espaces propres.
- Valeurs propres et vecteurs propres — les espaces propres sont des sous-espaces vectoriels fondamentaux.
- Matrice symétrique et antisymétrique — la décomposition \(\mathcal{M}_n(\mathbb{R}) = \mathcal{S}_n(\mathbb{R}) \oplus \mathcal{A}_n(\mathbb{R})\) est un exemple canonique de somme directe.
- Exercices corrigés : espaces vectoriels — pour t’entraîner sur des problèmes type concours.




