Rédigé et vérifié par un professeur diplômé de l’École Polytechnique, avec le niveau d’exigence attendu en classe préparatoire. Découvrir le professeur
Tu sais représenter un endomorphisme par une matrice — mais cette représentation dépend de la base choisie. Changer de base, c’est changer le point de vue sur un même objet linéaire : le vecteur ne bouge pas, seules ses coordonnées changent. La matrice de passage (ou matrice de changement de base) est l’outil central qui gouverne cette transformation. Elle intervient dans la diagonalisation, le calcul de puissances de matrices, la simplification d’endomorphismes — bref, dans presque tous les problèmes d’algèbre linéaire aux concours. Conforme au programme officiel des classes préparatoires scientifiques (MPSI, PCSI, MP, PC, PSI) 2025-2026.
I. Définition et construction de la matrice de passage
A. Rappels — bases et coordonnées
Soit \(E\) un espace vectoriel de dimension finie \(n\) sur \(\mathbb{K}\) (\(\mathbb{K} = \mathbb{R}\) ou \(\mathbb{C}\)). Une base de \(E\) est une famille \(\mathcal{B} = (e_1, \ldots, e_n)\) qui est à la fois libre et génératrice.
Tout vecteur \(v \in E\) s’écrit de manière unique :
\(v = x_1 e_1 + x_2 e_2 + \cdots + x_n e_n\)Le \(n\)-uplet \((x_1, \ldots, x_n)\) est le vecteur de coordonnées de \(v\) dans la base \(\mathcal{B}\), noté :
\([v]_{\mathcal{B}} = \begin{pmatrix} x_1 \\ x_2 \\ \vdots \\ x_n \end{pmatrix} \in \mathbb{K}^n\)Ces coordonnées dépendent entièrement de la base choisie : un même vecteur \(v\) a des coordonnées différentes dans deux bases distinctes. La matrice de passage fait le lien entre ces deux représentations. Pour un rappel complet sur les bases et la dimension, consulte le cours sur les sous-espaces vectoriels.
B. Définition formelle
Définition — Matrice de passage
Soient \(\mathcal{B} = (e_1, \ldots, e_n)\) et \(\mathcal{B}^\prime = (e_1^\prime, \ldots, e_n^\prime)\) deux bases de \(E\).
La matrice de passage de \(\mathcal{B}\) à \(\mathcal{B}^\prime\), notée \(P_{\mathcal{B} \to \mathcal{B}^\prime}\) (ou simplement \(P\)), est la matrice de \(\mathcal{M}_n(\mathbb{K})\) dont la \(j\)-ème colonne contient les coordonnées du vecteur \(e_j^\prime\) dans la base \(\mathcal{B}\) :
\(P_{\mathcal{B} \to \mathcal{B}^\prime} = \Big( [e_1^\prime]_{\mathcal{B}} \;\; [e_2^\prime]_{\mathcal{B}} \;\; \cdots \;\; [e_n^\prime]_{\mathcal{B}} \Big)\)
Autrement dit, si \(e_j^\prime = \sum_{i=1}^{n} p_{ij} \, e_i\), alors \(P = (p_{ij})_{1 \leq i,j \leq n}\).
Règle de lecture : « matrice de passage de \(\mathcal{B}\) à \(\mathcal{B}^\prime\) » = on décompose les vecteurs de la base d’arrivée (\(\mathcal{B}^\prime\)) dans la base de départ (\(\mathcal{B}\)). Les colonnes sont les coordonnées des « nouveaux » vecteurs écrits dans les « anciens ». Retiens : colonnes = nouvelle base, coordonnées dans l’ancienne base.
C. Construction colonne par colonne — premier exemple
La construction de \(P\) se résume à décomposer chaque vecteur de \(\mathcal{B}^\prime\) dans la base \(\mathcal{B}\), puis à ranger les résultats en colonnes.
Exemple 1 — Changement de base dans \(\mathbb{R}^2\)
Soient \(\mathcal{B} = (e_1, e_2)\) la base canonique de \(\mathbb{R}^2\) et \(\mathcal{B}^\prime = (e_1^\prime, e_2^\prime)\) avec :
\(e_1^\prime = 2e_1 + e_2, \qquad e_2^\prime = e_1 – e_2\)
La matrice de passage de \(\mathcal{B}\) à \(\mathcal{B}^\prime\) est :
\(P_{\mathcal{B} \to \mathcal{B}^\prime} = \begin{pmatrix} 2 & 1 \\ 1 & -1 \end{pmatrix}\)
La première colonne \(\begin{pmatrix} 2 \\ 1 \end{pmatrix}\) contient les coordonnées de \(e_1^\prime\) dans \(\mathcal{B}\), et la seconde colonne celles de \(e_2^\prime\).
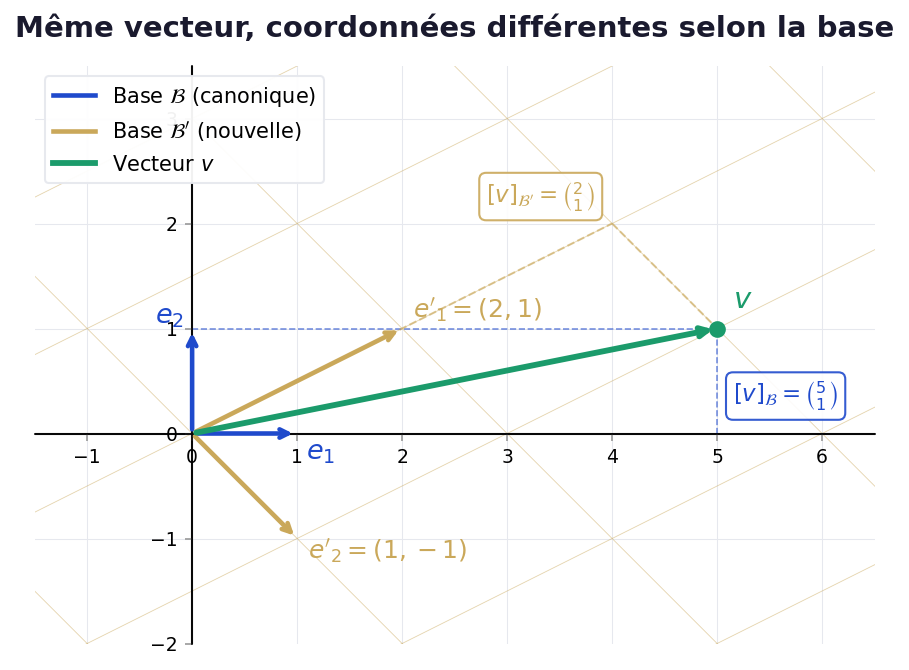
Ce graphique illustre le principe fondamental : le vecteur \(v\) ne change pas. Seules ses coordonnées changent lorsqu’on passe d’un système de référence (base) à un autre.
D. Exemple en dimension 3
Exemple 2 — Construction dans \(\mathbb{R}^3\)
Soit \(\mathcal{B} = (e_1, e_2, e_3)\) la base canonique de \(\mathbb{R}^3\) et \(\mathcal{B}^\prime = (e_1^\prime, e_2^\prime, e_3^\prime)\) définie par :
\(e_1^\prime = e_1 + e_2 + e_3, \qquad e_2^\prime = e_1 – e_2, \qquad e_3^\prime = e_1 + e_3\)
Alors :
\(P_{\mathcal{B} \to \mathcal{B}^\prime} = \begin{pmatrix} 1 & 1 & 1 \\ 1 & -1 & 0 \\ 1 & 0 & 1 \end{pmatrix}\)
Vérification : \(\det(P) = 1 \cdot ((-1) \cdot 1 – 0 \cdot 0) – 1 \cdot (1 \cdot 1 – 0 \cdot 1) + 1 \cdot (1 \cdot 0 – (-1) \cdot 1) = -1 – 1 + 1 = -1 \neq 0\).
Le déterminant est non nul : \(P\) est bien inversible, comme attendu pour toute matrice de passage.
II. Formules de changement de base
La matrice de passage permet deux transformations fondamentales : changer les coordonnées d’un vecteur, et changer la matrice d’un endomorphisme. Ce sont les deux formules que tu dois maîtriser parfaitement.
A. Changement de coordonnées d’un vecteur
Théorème — Formule de changement de coordonnées
Soient \(\mathcal{B}\) et \(\mathcal{B}^\prime\) deux bases de \(E\), et \(P = P_{\mathcal{B} \to \mathcal{B}^\prime}\) la matrice de passage. Pour tout vecteur \(v \in E\) :
\([v]_{\mathcal{B}} = P \cdot [v]_{\mathcal{B}^\prime}\)
Ou de manière équivalente :
\([v]_{\mathcal{B}^\prime} = P^{-1} \cdot [v]_{\mathcal{B}}\)
Démonstration. Soit \(v \in E\). On note \([v]_{\mathcal{B}^\prime} = \begin{pmatrix} x_1^\prime \\ \vdots \\ x_n^\prime \end{pmatrix}\), de sorte que \(v = \sum_{j=1}^{n} x_j^\prime \, e_j^\prime\).
Or chaque \(e_j^\prime = \sum_{i=1}^{n} p_{ij} \, e_i\) par définition de \(P\). Donc :
\(v = \sum_{j=1}^{n} x_j^\prime \sum_{i=1}^{n} p_{ij} \, e_i = \sum_{i=1}^{n} \left( \sum_{j=1}^{n} p_{ij} \, x_j^\prime \right) e_i\)Par unicité de la décomposition dans \(\mathcal{B}\), la \(i\)-ème coordonnée de \(v\) dans \(\mathcal{B}\) est \(\sum_{j=1}^{n} p_{ij} \, x_j^\prime\), soit exactement le \(i\)-ème coefficient du produit \(P \cdot [v]_{\mathcal{B}^\prime}\). ∎
Moyen mnémotechnique : « anciennes coordonnées = \(P\) × nouvelles coordonnées ». Pour retrouver le sens, retiens que \(P\) contient les « nouvelles » base-vecteurs exprimés dans l’« ancienne » base — en multipliant par les nouvelles coordonnées, on retombe sur les anciennes.
Exemple 3 — Application numérique
Reprenons l’Exemple 1 avec \(P = \begin{pmatrix} 2 & 1 \\ 1 & -1 \end{pmatrix}\). Soit \(v\) de coordonnées \([v]_{\mathcal{B}^\prime} = \begin{pmatrix} 3 \\ 1 \end{pmatrix}\) dans \(\mathcal{B}^\prime\).
Alors \([v]_{\mathcal{B}} = P \cdot [v]_{\mathcal{B}^\prime} = \begin{pmatrix} 2 & 1 \\ 1 & -1 \end{pmatrix} \begin{pmatrix} 3 \\ 1 \end{pmatrix} = \begin{pmatrix} 7 \\ 2 \end{pmatrix}\).
Vérification : \(v = 3e_1^\prime + e_2^\prime = 3(2e_1 + e_2) + (e_1 – e_2) = 7e_1 + 2e_2\). ✓
Fiche de synthèse — Matrice de changement de base
Définition, formules de changement de coordonnées et d’endomorphisme, propriétés, pièges à éviter — tout sur une seule page recto-verso.
📄 Télécharger la fiche PDFPour réviser efficacement avant un DS ou un concours.
B. Formule pour un endomorphisme : \(P^{-1}AP\)
La deuxième formule fondamentale concerne la matrice d’une application linéaire. Quand on change de base, la matrice de l’endomorphisme change — et la matrice de passage dicte comment.
Théorème — Formule de changement de base pour un endomorphisme ⋆
Soit \(f \in \mathcal{L}(E)\) un endomorphisme. Si \(A = \mathrm{Mat}_{\mathcal{B}}(f)\) est la matrice de \(f\) dans la base \(\mathcal{B}\), alors la matrice de \(f\) dans la base \(\mathcal{B}^\prime\) est :
\(\mathrm{Mat}_{\mathcal{B}^\prime}(f) = P^{-1} A P\)
où \(P = P_{\mathcal{B} \to \mathcal{B}^\prime}\).
C. Démonstration ⋆
Cette démonstration est exigible aux concours. Voici le raisonnement complet.
Soit \(v \in E\). Notons \(X = [v]_{\mathcal{B}}\), \(X^\prime = [v]_{\mathcal{B}^\prime}\), \(Y = [f(v)]_{\mathcal{B}}\) et \(Y^\prime = [f(v)]_{\mathcal{B}^\prime}\).
Par définition de la matrice d’un endomorphisme dans une base :
\(Y = AX \qquad \text{et} \qquad Y^\prime = A^\prime X^\prime\)où \(A^\prime = \mathrm{Mat}_{\mathcal{B}^\prime}(f)\) est la matrice cherchée. Par la formule de changement de coordonnées :
\(X = PX^\prime \qquad \text{et} \qquad Y = PY^\prime\)En substituant dans \(Y = AX\) :
\(PY^\prime = A(PX^\prime) = APX^\prime\)En multipliant à gauche par \(P^{-1}\) (qui existe car \(P\) est inversible) :
\(Y^\prime = P^{-1}APX^\prime\)Ceci étant vrai pour tout \(v \in E\), donc pour tout \(X^\prime \in \mathbb{K}^n\), on en déduit :
\(A^\prime = P^{-1}AP\) ∎
Attention à l’ordre des facteurs ! La formule est \(P^{-1}AP\), pas \(PAP^{-1}\) ni \(P^{-1}A P^{-1}\). Retiens la structure : \(P^{-1}\) à gauche, \(P\) à droite. Si tu confonds le sens de \(P\), l’erreur s’inverse : tu obtiens \(PAP^{-1}\), ce qui revient à prendre \(P_{\mathcal{B}^\prime \to \mathcal{B}}\) au lieu de \(P_{\mathcal{B} \to \mathcal{B}^\prime}\).
Extension — Formes bilinéaires. Pour une forme bilinéaire \(\varphi\) de matrice \(A = \mathrm{Mat}_{\mathcal{B}}(\varphi)\), la formule de changement de base est différente : \(\mathrm{Mat}_{\mathcal{B}^\prime}(\varphi) = {}^tP \, A \, P\) (avec la transposée de \(P\)). Ne pas confondre les deux formules.
D. Lien avec la diagonalisation
La diagonalisation est le cas particulier le plus important du changement de base.
Si \(f\) admet \(n\) valeurs propres (comptées avec multiplicité) \(\lambda_1, \ldots, \lambda_n\) et si l’on choisit \(\mathcal{B}^\prime = (v_1, \ldots, v_n)\) une base de vecteurs propres associés, alors :
\(P^{-1}AP = D = \begin{pmatrix} \lambda_1 & 0 & \cdots & 0 \\ 0 & \lambda_2 & \ddots & \vdots \\ \vdots & \ddots & \ddots & 0 \\ 0 & \cdots & 0 & \lambda_n \end{pmatrix}\)La matrice de passage \(P\) est alors formée des vecteurs propres en colonnes, et \(D\) est la matrice diagonale des valeurs propres. On écrit \(A = PDP^{-1}\), ce qui permet par exemple de calculer \(A^k = PD^kP^{-1}\) (voir le cours sur la matrice puissance).
Propriété — Caractérisation de la diagonalisabilité
Un endomorphisme \(f \in \mathcal{L}(E)\) est diagonalisable si et seulement s’il existe une base \(\mathcal{B}^\prime\) de \(E\) dans laquelle la matrice de \(f\) est diagonale, c’est-à-dire si et seulement s’il existe \(P\) inversible et \(D\) diagonale telles que \(\mathrm{Mat}_{\mathcal{B}}(f) = PDP^{-1}\).
III. Propriétés de la matrice de passage
La matrice de passage possède des propriétés algébriques essentielles qui structurent toute l’algèbre linéaire. Voici les résultats fondamentaux.
A. Inversibilité et matrice inverse
Propriété — Inversibilité de la matrice de passage
La matrice de passage \(P_{\mathcal{B} \to \mathcal{B}^\prime}\) est toujours inversible, et son inverse est la matrice de passage en sens inverse :
\(\left(P_{\mathcal{B} \to \mathcal{B}^\prime}\right)^{-1} = P_{\mathcal{B}^\prime \to \mathcal{B}}\)
Démonstration. Les colonnes de \(P_{\mathcal{B} \to \mathcal{B}^\prime}\) sont les coordonnées des vecteurs d’une base (\(\mathcal{B}^\prime\)) dans une autre base (\(\mathcal{B}\)). Comme \(\mathcal{B}^\prime\) est une base, ses vecteurs forment une famille libre : les colonnes de \(P\) sont linéairement indépendantes. Donc \(P\) est inversible.
Pour l’égalité \(P^{-1} = P_{\mathcal{B}^\prime \to \mathcal{B}}\) : notons \(Q = P_{\mathcal{B}^\prime \to \mathcal{B}}\). Pour tout \(v \in E\) :
\([v]_{\mathcal{B}} = P \cdot [v]_{\mathcal{B}^\prime} \quad \text{et} \quad [v]_{\mathcal{B}^\prime} = Q \cdot [v]_{\mathcal{B}}\)Donc \([v]_{\mathcal{B}} = P \cdot Q \cdot [v]_{\mathcal{B}} \;\; \forall v \in E\), soit \(PQ = I_n\). Ainsi \(Q = P^{-1}\). ∎
B. Composition de changements de base
Propriété — Relation de Chasles des matrices de passage
Soient \(\mathcal{B}\), \(\mathcal{B}^\prime\) et \(\mathcal{B}^{\prime\prime}\) trois bases de \(E\). Alors :
\(P_{\mathcal{B} \to \mathcal{B}^{\prime\prime}} = P_{\mathcal{B} \to \mathcal{B}^\prime} \cdot P_{\mathcal{B}^\prime \to \mathcal{B}^{\prime\prime}}\)
Démonstration. Pour tout \(v \in E\) :
\([v]_{\mathcal{B}} = P_{\mathcal{B} \to \mathcal{B}^\prime} \cdot [v]_{\mathcal{B}^\prime} = P_{\mathcal{B} \to \mathcal{B}^\prime} \cdot P_{\mathcal{B}^\prime \to \mathcal{B}^{\prime\prime}} \cdot [v]_{\mathcal{B}^{\prime\prime}}\)Par unicité, on identifie \(P_{\mathcal{B} \to \mathcal{B}^{\prime\prime}} = P_{\mathcal{B} \to \mathcal{B}^\prime} \cdot P_{\mathcal{B}^\prime \to \mathcal{B}^{\prime\prime}}\). ∎
Attention à l’ordre ! La formule ressemble à la relation de Chasles (\(\overrightarrow{AC} = \overrightarrow{AB} + \overrightarrow{BC}\)), mais ici c’est un produit matriciel, pas une somme. L’ordre de multiplication est crucial : \(P_{\mathcal{B} \to \mathcal{B}^\prime}\) à gauche, \(P_{\mathcal{B}^\prime \to \mathcal{B}^{\prime\prime}}\) à droite.
C. Déterminant d’une matrice de passage
De l’inversibilité de \(P\), on déduit immédiatement :
Propriété
\(\det(P_{\mathcal{B} \to \mathcal{B}^\prime}) \neq 0\)
De plus, \(\det(P_{\mathcal{B} \to \mathcal{B}^\prime}) \cdot \det(P_{\mathcal{B}^\prime \to \mathcal{B}}) = 1\).
La seconde relation découle de \(\det(P \cdot P^{-1}) = \det(I_n) = 1\) et de la multiplicativité du déterminant.
Dans le cas particulier d’une matrice orthogonale (passage entre deux bases orthonormées dans un espace euclidien), on a \(P^{-1} = {}^tP\) et \(\det(P) = \pm 1\).
D. Matrices semblables
La formule \(A^\prime = P^{-1}AP\) conduit naturellement à une relation d’équivalence fondamentale.
Définition — Matrices semblables
Deux matrices \(A, B \in \mathcal{M}_n(\mathbb{K})\) sont dites semblables s’il existe une matrice inversible \(P \in GL_n(\mathbb{K})\) telle que \(B = P^{-1}AP\).
Deux matrices sont semblables si et seulement si elles représentent le même endomorphisme dans deux bases différentes.
La relation de similitude est une relation d’équivalence sur \(\mathcal{M}_n(\mathbb{K})\) (réflexivité, symétrie, transitivité). Les invariants de similitude sont les quantités qui restent inchangées quand on passe d’une matrice à une matrice semblable :
| Invariant | Formule | Justification |
|---|---|---|
| Trace | \(\mathrm{tr}(P^{-1}AP) = \mathrm{tr}(A)\) | Propriété de circularité de la trace |
| Déterminant | \(\det(P^{-1}AP) = \det(A)\) | Multiplicativité du déterminant |
| Rang | \(\mathrm{rg}(P^{-1}AP) = \mathrm{rg}(A)\) | Multiplication par des inversibles conserve le rang |
| Polynôme caractéristique | \(\chi_{P^{-1}AP}(\lambda) = \chi_A(\lambda)\) | \(\det(P^{-1}AP – \lambda I) = \det(P^{-1}(A-\lambda I)P)\) |
| Valeurs propres | Même spectre | Mêmes racines du même polynôme caractéristique |
| Polynôme minimal | \(\mu_{P^{-1}AP} = \mu_A\) | \(Q(P^{-1}AP) = P^{-1}Q(A)P\) |
Matrices semblables ≠ matrices égales. Deux matrices semblables partagent tous les invariants ci-dessus, mais elles ne sont pas nécessairement égales. Inversement, deux matrices ayant le même polynôme caractéristique ne sont pas nécessairement semblables (exemple classique : \(I_2\) et \(\begin{pmatrix} 1 & 1 \\ 0 & 1 \end{pmatrix}\) ont le même polynôme caractéristique \((X-1)^2\) mais ne sont pas semblables).
IV. Méthode pas à pas
Voici l’algorithme systématique pour effectuer un changement de base complet — de la construction de \(P\) au calcul de la matrice dans la nouvelle base.
A. Algorithme en 5 étapes
Méthode — Changement de base en 5 étapes
- Identifier les deux bases. Repérer \(\mathcal{B}\) (base de départ, souvent la base canonique) et \(\mathcal{B}^\prime\) (base d’arrivée, souvent une base de vecteurs propres ou une base « adaptée »).
- Exprimer les vecteurs de \(\mathcal{B}^\prime\) dans \(\mathcal{B}\). Pour chaque \(e_j^\prime \in \mathcal{B}^\prime\), trouver ses coordonnées \([e_j^\prime]_{\mathcal{B}}\).
- Former la matrice de passage \(P\). Ranger les colonnes obtenues : la \(j\)-ème colonne de \(P\) est \([e_j^\prime]_{\mathcal{B}}\).
- Calculer \(P^{-1}\). Utiliser l’une des méthodes d’inversion : formule directe en dimension 2, pivot de Gauss, ou comatrice en dimension 3.
- Calculer \(A^\prime = P^{-1}AP\). Effectuer les deux produits matriciels (d’abord \(AP\), puis \(P^{-1} \cdot (AP)\)).
Quand utiliser un changement de base ?
- Diagonaliser une matrice : trouver une base de vecteurs propres → \(P^{-1}AP = D\).
- Calculer \(A^n\) : si \(A = PDP^{-1}\), alors \(A^n = PD^nP^{-1}\) (→ matrice puissance).
- Simplifier un endomorphisme : chercher une base dans laquelle la matrice est triangulaire ou diagonale par blocs.
- Résoudre un système différentiel : diagonaliser la matrice du système pour découpler les équations.
B. Exemple complet en dimension 3
Exemple 4 — Changement de base et simplification d’un endomorphisme
Soit \(f\) l’endomorphisme de \(\mathbb{R}^3\) dont la matrice dans la base canonique \(\mathcal{B}\) est :
\(A = \begin{pmatrix} 4 & -1 & -1 \\ 2 & 1 & -1 \\ 2 & -1 & 1 \end{pmatrix}\)
Exprimer la matrice de \(f\) dans la base \(\mathcal{B}^\prime = (v_1, v_2, v_3)\) où :
\(v_1 = \begin{pmatrix} 1 \\ 1 \\ 1 \end{pmatrix}, \quad v_2 = \begin{pmatrix} 1 \\ 1 \\ 0 \end{pmatrix}, \quad v_3 = \begin{pmatrix} 1 \\ 0 \\ 1 \end{pmatrix}\)
Étape 1 : Les bases \(\mathcal{B}\) et \(\mathcal{B}^\prime\) sont identifiées.
Étape 2 : Les vecteurs de \(\mathcal{B}^\prime\) sont donnés directement en coordonnées canoniques.
Étape 3 : La matrice de passage est :
\(P = \begin{pmatrix} 1 & 1 & 1 \\ 1 & 1 & 0 \\ 1 & 0 & 1 \end{pmatrix}\)
Étape 4 : On calcule \(P^{-1}\). Par la méthode du pivot de Gauss ou par la formule en dimension 3, on obtient :
\(P^{-1} = \begin{pmatrix} 1 & -1 & -1 \\ -1 & 0 & 1 \\ -1 & 1 & 0 \end{pmatrix}\)
(Vérification rapide : \(PP^{-1} = I_3\) ✓)
Étape 5 : Calcul de \(AP\) :
\(AP = \begin{pmatrix} 4 & -1 & -1 \\ 2 & 1 & -1 \\ 2 & -1 & 1 \end{pmatrix} \begin{pmatrix} 1 & 1 & 1 \\ 1 & 1 & 0 \\ 1 & 0 & 1 \end{pmatrix} = \begin{pmatrix} 2 & 3 & 3 \\ 2 & 3 & 1 \\ 2 & 1 & 3 \end{pmatrix}\)
Puis \(P^{-1}AP\) :
\(P^{-1}AP = \begin{pmatrix} 1 & -1 & -1 \\ -1 & 0 & 1 \\ -1 & 1 & 0 \end{pmatrix} \begin{pmatrix} 2 & 3 & 3 \\ 2 & 3 & 1 \\ 2 & 1 & 3 \end{pmatrix} = \begin{pmatrix} -2 & -1 & -1 \\ 0 & -2 & 0 \\ 0 & 0 & -2 \end{pmatrix}\)
La matrice de \(f\) dans \(\mathcal{B}^\prime\) est triangulaire supérieure. On lit directement les valeurs propres sur la diagonale : \(\lambda = -2\) (valeur propre triple). En revanche, la matrice n’est pas diagonale, donc \(f\) n’est pas diagonalisable.
V. Exercices corrigés
Voici 8 exercices classés par difficulté croissante. Essaie chaque exercice sur papier avant de consulter la correction.
Exercice 1 ★ — Construire la matrice de passage dans \(\mathbb{R}^2\)
Soient \(\mathcal{B} = (e_1, e_2)\) la base canonique de \(\mathbb{R}^2\) et \(\mathcal{B}^\prime = (\varepsilon_1, \varepsilon_2)\) avec \(\varepsilon_1 = 3e_1 + e_2\) et \(\varepsilon_2 = -e_1 + 2e_2\).
Déterminer \(P_{\mathcal{B} \to \mathcal{B}^\prime}\).
Correction
Les coordonnées de \(\varepsilon_1\) dans \(\mathcal{B}\) sont \(\begin{pmatrix} 3 \\ 1 \end{pmatrix}\) et celles de \(\varepsilon_2\) sont \(\begin{pmatrix} -1 \\ 2 \end{pmatrix}\).
Donc \(P_{\mathcal{B} \to \mathcal{B}^\prime} = \begin{pmatrix} 3 & -1 \\ 1 & 2 \end{pmatrix}\).
Vérification : \(\det(P) = 3 \times 2 – (-1) \times 1 = 7 \neq 0\). ✓
Exercice 2 ★ — Changer les coordonnées d’un vecteur
Avec les bases de l’exercice 1, le vecteur \(v\) a pour coordonnées \([v]_{\mathcal{B}^\prime} = \begin{pmatrix} 2 \\ -1 \end{pmatrix}\) dans \(\mathcal{B}^\prime\). Déterminer \([v]_{\mathcal{B}}\).
Correction
On applique \([v]_{\mathcal{B}} = P \cdot [v]_{\mathcal{B}^\prime}\) :
\([v]_{\mathcal{B}} = \begin{pmatrix} 3 & -1 \\ 1 & 2 \end{pmatrix} \begin{pmatrix} 2 \\ -1 \end{pmatrix} = \begin{pmatrix} 3 \times 2 + (-1) \times (-1) \\ 1 \times 2 + 2 \times (-1) \end{pmatrix} = \begin{pmatrix} 7 \\ 0 \end{pmatrix}\)Vérification : \(v = 2\varepsilon_1 – \varepsilon_2 = 2(3e_1 + e_2) – (-e_1 + 2e_2) = 7e_1 + 0 \cdot e_2\). ✓
Exercice 3 ★ — Vérifier la relation \(P^{-1} = P_{\mathcal{B}^\prime \to \mathcal{B}}\)
Avec les bases de l’exercice 1 :
- Calculer \(P^{-1}\) en utilisant la formule d’inversion 2×2.
- Exprimer \(e_1\) et \(e_2\) dans la base \(\mathcal{B}^\prime\) pour construire \(P_{\mathcal{B}^\prime \to \mathcal{B}}\).
- Vérifier l’égalité.
Correction
1. Avec la formule \(\begin{pmatrix} a & b \\ c & d \end{pmatrix}^{-1} = \displaystyle\frac{1}{ad-bc} \begin{pmatrix} d & -b \\ -c & a \end{pmatrix}\) :
\(P^{-1} = \displaystyle\frac{1}{7} \begin{pmatrix} 2 & 1 \\ -1 & 3 \end{pmatrix}\)2. On résout \(e_1 = \alpha \varepsilon_1 + \beta \varepsilon_2\), soit \(\begin{pmatrix} 1 \\ 0 \end{pmatrix} = \alpha \begin{pmatrix} 3 \\ 1 \end{pmatrix} + \beta \begin{pmatrix} -1 \\ 2 \end{pmatrix}\).
Système : \(3\alpha – \beta = 1\) et \(\alpha + 2\beta = 0\). On trouve \(\alpha = \displaystyle\frac{2}{7}\), \(\beta = -\displaystyle\frac{1}{7}\).
De même, \(e_2 = \displaystyle\frac{1}{7} \varepsilon_1 + \displaystyle\frac{3}{7} \varepsilon_2\).
Donc \(P_{\mathcal{B}^\prime \to \mathcal{B}} = \displaystyle\frac{1}{7} \begin{pmatrix} 2 & 1 \\ -1 & 3 \end{pmatrix}\).
3. On vérifie \(P^{-1} = P_{\mathcal{B}^\prime \to \mathcal{B}}\). ✓
Exercice 4 ★★ — Changement de base pour un endomorphisme de \(\mathbb{R}^2\)
Soit \(f \in \mathcal{L}(\mathbb{R}^2)\) dont la matrice dans la base canonique \(\mathcal{B}\) est \(A = \begin{pmatrix} 5 & -3 \\ 3 & -1 \end{pmatrix}\).
On pose \(\mathcal{B}^\prime = (u, v)\) avec \(u = \begin{pmatrix} 1 \\ 1 \end{pmatrix}\) et \(v = \begin{pmatrix} 3 \\ 1 \end{pmatrix}\) (vecteurs de \(\mathbb{R}^2\) en coordonnées canoniques). Calculer \(\mathrm{Mat}_{\mathcal{B}^\prime}(f)\).
Correction
Matrice de passage : \(P = \begin{pmatrix} 1 & 3 \\ 1 & 1 \end{pmatrix}\), \(\det(P) = 1 – 3 = -2 \neq 0\).
Inverse : \(P^{-1} = \displaystyle\frac{1}{-2} \begin{pmatrix} 1 & -3 \\ -1 & 1 \end{pmatrix} = \begin{pmatrix} -\displaystyle\frac{1}{2} & \displaystyle\frac{3}{2} \\ \displaystyle\frac{1}{2} & -\displaystyle\frac{1}{2} \end{pmatrix}\)
Calcul de \(AP\) :
\(AP = \begin{pmatrix} 5 & -3 \\ 3 & -1 \end{pmatrix} \begin{pmatrix} 1 & 3 \\ 1 & 1 \end{pmatrix} = \begin{pmatrix} 2 & 12 \\ 2 & 8 \end{pmatrix}\)Calcul de \(P^{-1}AP\) :
\(P^{-1}AP = \begin{pmatrix} -\displaystyle\frac{1}{2} & \displaystyle\frac{3}{2} \\ \displaystyle\frac{1}{2} & -\displaystyle\frac{1}{2} \end{pmatrix} \begin{pmatrix} 2 & 12 \\ 2 & 8 \end{pmatrix} = \begin{pmatrix} 2 & 6 \\ 0 & 2 \end{pmatrix}\)La matrice dans \(\mathcal{B}^\prime\) est \(\begin{pmatrix} 2 & 6 \\ 0 & 2 \end{pmatrix}\), qui est triangulaire supérieure. La valeur propre \(\lambda = 2\) apparaît sur la diagonale. On note que le bloc n’est pas diagonal : \(f\) n’est pas diagonalisable (car \(u\) est vecteur propre mais \(v\) ne l’est pas).
Vérification rapide : \(\mathrm{tr}(A) = 5 + (-1) = 4 = 2 + 2 = \mathrm{tr}(P^{-1}AP)\). ✓
Exercice 5 ★★ — Montrer que deux matrices sont semblables
On pose \(A = \begin{pmatrix} 0 & -1 \\ 1 & 0 \end{pmatrix}\) et \(B = \begin{pmatrix} 0 & 1 \\ -1 & 0 \end{pmatrix}\). Montrer que \(A\) et \(B\) sont semblables en trouvant \(P \in GL_2(\mathbb{R})\) telle que \(B = P^{-1}AP\).
Correction
On observe que \(B = -A\). On cherche \(P\) inversible telle que \(-A = P^{-1}AP\), soit \(AP = -PA\).
Posons \(P = \begin{pmatrix} a & b \\ c & d \end{pmatrix}\). On calcule :
\(AP = \begin{pmatrix} -c & -d \\ a & b \end{pmatrix}, \qquad -PA = \begin{pmatrix} -b & a \\ -d & c \end{pmatrix}\)L’identification donne : \(-c = -b\), \(-d = a\), \(a = -d\), \(b = c\). Soit \(b = c\) et \(d = -a\).
Prenons \(a = 1, b = 0\) : \(P = \begin{pmatrix} 1 & 0 \\ 0 & -1 \end{pmatrix}\), \(\det(P) = -1 \neq 0\).
Vérification : \(P^{-1} = P\) (car \(P^2 = I_2\)). Alors \(P^{-1}AP = PAP = \begin{pmatrix} 1 & 0 \\ 0 & -1 \end{pmatrix} \begin{pmatrix} 0 & -1 \\ 1 & 0 \end{pmatrix} \begin{pmatrix} 1 & 0 \\ 0 & -1 \end{pmatrix} = \begin{pmatrix} 0 & -1 \\ -1 & 0 \end{pmatrix} \begin{pmatrix} 1 & 0 \\ 0 & -1 \end{pmatrix} = \begin{pmatrix} 0 & 1 \\ -1 & 0 \end{pmatrix} = B\). ✓
Exercice 6 ★★ — Composition de changements de base
Soient \(\mathcal{B}_1\), \(\mathcal{B}_2\) et \(\mathcal{B}_3\) trois bases de \(\mathbb{R}^2\) telles que :
\(P_{\mathcal{B}_1 \to \mathcal{B}_2} = \begin{pmatrix} 1 & 2 \\ 0 & 1 \end{pmatrix}, \qquad P_{\mathcal{B}_2 \to \mathcal{B}_3} = \begin{pmatrix} 3 & 0 \\ 1 & -1 \end{pmatrix}\)- Calculer \(P_{\mathcal{B}_1 \to \mathcal{B}_3}\).
- Calculer \(P_{\mathcal{B}_3 \to \mathcal{B}_1}\).
Correction
1. Par la relation de composition :
\(P_{\mathcal{B}_1 \to \mathcal{B}_3} = P_{\mathcal{B}_1 \to \mathcal{B}_2} \cdot P_{\mathcal{B}_2 \to \mathcal{B}_3} = \begin{pmatrix} 1 & 2 \\ 0 & 1 \end{pmatrix} \begin{pmatrix} 3 & 0 \\ 1 & -1 \end{pmatrix} = \begin{pmatrix} 5 & -2 \\ 1 & -1 \end{pmatrix}\)2. \(P_{\mathcal{B}_3 \to \mathcal{B}_1} = (P_{\mathcal{B}_1 \to \mathcal{B}_3})^{-1}\). Avec \(\det(P_{\mathcal{B}_1 \to \mathcal{B}_3}) = -5 + 2 = -3\) :
\(P_{\mathcal{B}_3 \to \mathcal{B}_1} = \displaystyle\frac{1}{-3} \begin{pmatrix} -1 & 2 \\ -1 & 5 \end{pmatrix} = \begin{pmatrix} \displaystyle\frac{1}{3} & -\displaystyle\frac{2}{3} \\ \displaystyle\frac{1}{3} & -\displaystyle\frac{5}{3} \end{pmatrix}\)Vérification : \(P_{\mathcal{B}_1 \to \mathcal{B}_3} \cdot P_{\mathcal{B}_3 \to \mathcal{B}_1} = I_2\). ✓
Exercice 7 ★★★ — Diagonalisation complète par changement de base
Soit \(A = \begin{pmatrix} 1 & 1 & 0 \\ 0 & 2 & 0 \\ 0 & 1 & 3 \end{pmatrix} \in \mathcal{M}_3(\mathbb{R})\).
- Calculer le polynôme caractéristique de \(A\) et en déduire les valeurs propres.
- Déterminer les sous-espaces propres.
- Construire la matrice de passage \(P\) et vérifier que \(P^{-1}AP\) est diagonale.
Correction
1. \(\chi_A(\lambda) = \det(A – \lambda I_3) = \det \begin{pmatrix} 1-\lambda & 1 & 0 \\ 0 & 2-\lambda & 0 \\ 0 & 1 & 3-\lambda \end{pmatrix}\)
La matrice est triangulaire supérieure en blocs. On développe par la première colonne ou on exploite la forme triangulaire :
\(\chi_A(\lambda) = (1-\lambda)(2-\lambda)(3-\lambda)\)Les valeurs propres sont \(\lambda_1 = 1\), \(\lambda_2 = 2\), \(\lambda_3 = 3\).
2.
Sous-espace propre \(E_1 = \ker(A – I_3)\) :
\(A – I_3 = \begin{pmatrix} 0 & 1 & 0 \\ 0 & 1 & 0 \\ 0 & 1 & 2 \end{pmatrix}\)Le système \((A – I_3)X = 0\) donne \(x_2 = 0\) et \(x_2 + 2x_3 = 0\), donc \(x_2 = x_3 = 0\), \(x_1\) libre. Ainsi \(E_1 = \mathrm{Vect}\begin{pmatrix} 1 \\ 0 \\ 0 \end{pmatrix}\).
Sous-espace propre \(E_2 = \ker(A – 2I_3)\) :
\(A – 2I_3 = \begin{pmatrix} -1 & 1 & 0 \\ 0 & 0 & 0 \\ 0 & 1 & 1 \end{pmatrix}\)On obtient \(x_1 = x_2\) et \(x_2 + x_3 = 0\), donc \(x_2 = -x_3\) et \(x_1 = -x_3\). Ainsi \(E_2 = \mathrm{Vect}\begin{pmatrix} -1 \\ -1 \\ 1 \end{pmatrix} = \mathrm{Vect}\begin{pmatrix} 1 \\ 1 \\ -1 \end{pmatrix}\).
Sous-espace propre \(E_3 = \ker(A – 3I_3)\) :
\(A – 3I_3 = \begin{pmatrix} -2 & 1 & 0 \\ 0 & -1 & 0 \\ 0 & 1 & 0 \end{pmatrix}\)On obtient \(x_2 = 0\) et \(-2x_1 + x_2 = 0\), donc \(x_1 = 0\), \(x_3\) libre. Ainsi \(E_3 = \mathrm{Vect}\begin{pmatrix} 0 \\ 0 \\ 1 \end{pmatrix}\).
3. La matrice de passage (vecteurs propres en colonnes) est :
\(P = \begin{pmatrix} 1 & 1 & 0 \\ 0 & 1 & 0 \\ 0 & -1 & 1 \end{pmatrix}\)On calcule \(P^{-1}\) (par Gauss ou comatrice) :
\(P^{-1} = \begin{pmatrix} 1 & -1 & 0 \\ 0 & 1 & 0 \\ 0 & 1 & 1 \end{pmatrix}\)Vérification : \(PP^{-1} = I_3\) ✓. Puis :
\(P^{-1}AP = \begin{pmatrix} 1 & 0 & 0 \\ 0 & 2 & 0 \\ 0 & 0 & 3 \end{pmatrix} = D\)On retrouve la matrice diagonale des valeurs propres. ✓
Exercice 8 ★★★ — Invariants de similitude (raisonnement)
Soit \(A \in \mathcal{M}_n(\mathbb{K})\). Montrer que si \(B\) est semblable à \(A\), alors :
- \(\mathrm{tr}(B) = \mathrm{tr}(A)\)
- \(\det(B) = \det(A)\)
- \(\chi_B = \chi_A\) (même polynôme caractéristique)
Correction
Par hypothèse, il existe \(P \in GL_n(\mathbb{K})\) telle que \(B = P^{-1}AP\).
1. Trace. On utilise la propriété de circularité : \(\mathrm{tr}(MN) = \mathrm{tr}(NM)\) pour tous \(M, N \in \mathcal{M}_n(\mathbb{K})\).
\(\mathrm{tr}(B) = \mathrm{tr}(P^{-1}AP) = \mathrm{tr}(AP \cdot P^{-1}) = \mathrm{tr}(A \cdot I_n) = \mathrm{tr}(A)\)(On a posé \(M = P^{-1}\) et \(N = AP\), d’où \(\mathrm{tr}(MN) = \mathrm{tr}(NM) = \mathrm{tr}(APP^{-1}) = \mathrm{tr}(A)\).)
2. Déterminant. Par multiplicativité du déterminant :
\(\det(B) = \det(P^{-1}AP) = \det(P^{-1}) \det(A) \det(P) = \displaystyle\frac{1}{\det(P)} \cdot \det(A) \cdot \det(P) = \det(A)\)3. Polynôme caractéristique.
\(\chi_B(\lambda) = \det(B – \lambda I_n) = \det(P^{-1}AP – \lambda I_n)\)Or \(\lambda I_n = P^{-1}(\lambda I_n)P\), donc :
\(\chi_B(\lambda) = \det(P^{-1}AP – P^{-1}(\lambda I_n)P) = \det(P^{-1}(A – \lambda I_n)P)\)Par multiplicativité : \(\det(P^{-1}(A – \lambda I_n)P) = \det(P^{-1})\det(A – \lambda I_n)\det(P) = \det(A – \lambda I_n) = \chi_A(\lambda)\).
Donc \(\chi_B = \chi_A\). ∎
VI. Erreurs fréquentes et pièges classiques
Le changement de base est l’un des sujets où les erreurs de convention sont les plus fréquentes en DS et aux concours. Voici les pièges à connaître absolument.
Piège 1 — Inverser le sens de la matrice de passage
❌ Copie fautive : « La matrice de passage de \(\mathcal{B}\) à \(\mathcal{B}^\prime\) a pour colonnes les coordonnées des vecteurs de \(\mathcal{B}\) dans \(\mathcal{B}^\prime\). »
Diagnostic : L’étudiant a inversé le rôle des deux bases. C’est l’erreur la plus courante et la plus coûteuse.
✅ Correction : Les colonnes de \(P_{\mathcal{B} \to \mathcal{B}^\prime}\) sont les coordonnées des vecteurs de \(\mathcal{B}^\prime\) (la base d’arrivée) exprimés dans \(\mathcal{B}\) (la base de départ).
Piège 2 — Se tromper dans la formule \(P^{-1}AP\)
❌ Copie fautive : « On a \(\mathrm{Mat}_{\mathcal{B}^\prime}(f) = PAP^{-1}\). »
Diagnostic : L’étudiant a permuté \(P\) et \(P^{-1}\). Cela revient à utiliser \(P_{\mathcal{B}^\prime \to \mathcal{B}}\) au lieu de \(P_{\mathcal{B} \to \mathcal{B}^\prime}\).
✅ Correction : \(\mathrm{Mat}_{\mathcal{B}^\prime}(f) = P^{-1}AP\) avec \(P = P_{\mathcal{B} \to \mathcal{B}^\prime}\). Retiens : « \(P^{-1}\) à gauche, \(P\) à droite ».
Piège 3 — Confondre \(P^{-1}AP\) (endomorphisme) et \({}^tPAP\) (forme bilinéaire)
Diagnostic : Les deux formules se ressemblent mais ne s’appliquent pas aux mêmes objets. La formule \(P^{-1}AP\) concerne les endomorphismes ; la formule \({}^tPAP\) concerne les formes bilinéaires et quadratiques.
Moyen de distinction : si tu changes la matrice d’un endomorphisme, utilise \(P^{-1}\). Si tu changes la matrice d’une forme, utilise \({}^tP\).
Piège 4 — Croire que même polynôme caractéristique ⟹ semblables
❌ Copie fautive : « \(A\) et \(B\) ont le même polynôme caractéristique, donc elles sont semblables. »
Contre-exemple : \(A = I_2\) et \(B = \begin{pmatrix} 1 & 1 \\ 0 & 1 \end{pmatrix}\) ont le même \(\chi = (X-1)^2\) mais ne sont pas semblables (\(A\) est diagonale, \(B\) ne l’est pas et ne peut pas l’être car \(E_1(B)\) est de dimension 1).
✅ Règle : même \(\chi\) est une condition nécessaire mais pas suffisante pour la similitude.
VII. Questions fréquentes
Quelle est la différence entre matrice de passage et matrice d'une application linéaire ?
La matrice de passage \(P_{\mathcal{B} \to \mathcal{B}^\prime}\) relie deux bases d’un même espace : elle encode comment exprimer les vecteurs d’une base dans l’autre. La matrice d’une application linéaire \(\mathrm{Mat}_{\mathcal{B}}(f)\) encode l’action d’un endomorphisme \(f\) dans une base donnée. La matrice de passage est un cas particulier : c’est la matrice de l’application identité \(\mathrm{id}_E\) entre les bases \(\mathcal{B}^\prime\) (départ) et \(\mathcal{B}\) (arrivée).
La matrice de passage est-elle toujours inversible ?
Oui, toujours. Ses colonnes sont les coordonnées d’une base dans une autre base, donc elles forment une famille libre de \(\mathbb{K}^n\). Le déterminant d’une matrice de passage est toujours non nul. Son inverse est la matrice de passage en sens contraire : \((P_{\mathcal{B} \to \mathcal{B}^\prime})^{-1} = P_{\mathcal{B}^\prime \to \mathcal{B}}\).
Quel est le lien entre changement de base et diagonalisation ?
La diagonalisation est un changement de base particulier. Diagonaliser une matrice \(A\), c’est trouver une base \(\mathcal{B}^\prime\) de vecteurs propres dans laquelle la matrice de l’endomorphisme est diagonale : \(P^{-1}AP = D\). La matrice de passage \(P\) a alors pour colonnes les vecteurs propres de \(A\), et \(D\) est la diagonale des valeurs propres.
Que signifie matrices semblables ?
Deux matrices \(A\) et \(B\) sont semblables s’il existe \(P \in GL_n(\mathbb{K})\) telle que \(B = P^{-1}AP\). Cela signifie qu’elles représentent le même endomorphisme dans deux bases différentes. Elles partagent tous les invariants : trace, déterminant, polynôme caractéristique, rang, valeurs propres, polynôme minimal.
Comment choisir la bonne base pour simplifier un endomorphisme ?
L’objectif est de trouver une base dans laquelle la matrice est la plus simple possible (diagonale, triangulaire, ou diagonale par blocs). En pratique : (1) calculer les valeurs propres, (2) déterminer les sous-espaces propres, (3) si la somme des dimensions des sous-espaces propres égale \(n\), l’endomorphisme est diagonalisable et la base de vecteurs propres convient. Sinon, on cherche une base de « Jordan » ou de « Dunford » pour obtenir une forme triangulaire structurée.
VIII. Pour aller plus loin
Tu maîtrises maintenant la matrice de changement de base et la formule \(P^{-1}AP\). Pour approfondir, voici les prolongements naturels :
- 📖 Les matrices en mathématiques : cours complet — le cours pilier du cocon
- → Diagonalisation d’une matrice : méthode complète — le cas particulier \(P^{-1}AP = D\)
- → Matrice d’une application linéaire — comprendre pourquoi la matrice dépend de la base
- → Matrice puissance : calcul de \(A^n\) — exploiter \(A = PDP^{-1}\) pour calculer \(A^n\)
- → Inverse d’une matrice : méthode de calcul — pour calculer \(P^{-1}\)
- → Valeurs propres et vecteurs propres — indispensable pour construire la base de diagonalisation
- ✏️ Exercices corrigés sur les matrices — pour t’entraîner sur l’ensemble du chapitre




